末端执行器,海陆空机器人的“心灵之手”
原创 2020-03-02 10:24 倚歌 来源:AGV网机器人末端执行器,也称为手臂末端工具(EOAT),是连接到机械臂末端的设备。它们被设计用作与环境互动的机器人手腕。在机器人技术中,末端执行器是位于机器人手臂末端的设备,旨在与环境互动。该设备的确切性质取决于机器人的应用。
说的更直白些,机器人末端执行器类似有人操作的叉车(工业车辆)不同功能的属具。
在严格的定义中,机器人末端执行器起源于串行机器人操纵器,末端执行器是指机器人的最后一个链接(或末端)。在此端点上,工具和机器人链接。从广义上讲,末端执行器可以看作是与工作环境交互的机器人的一部分。比如移动机器人的轮子,它们不是末端执行器,而是机器人移动性的一部分。
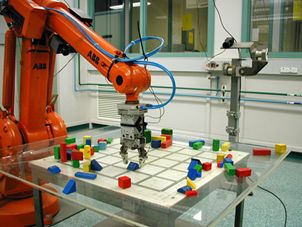
▲机器人末端执行器-夹具

▲麻省理工大学开发的末端执行器-Origami Flower Gripper(折纸花抓夹)
末端执行器是机器人系统的主要部分之一,也是重要的组成部分。技术的出现导致终端执行器的改进,可以根据程序执行一组不同的任务。多臂机器人包括多个末端执行器。一般分为:机器人夹爪、机器人工具。
根据国外一些市场研究公司所做的研究,2018年,全球末端执行器市场的收入超过25亿美元。预计到2025年,将增长到65亿美元,在2019年至2025年之间增长14%。
制造业的工业4.0时代的到来,包括云机器人技术、自动化、网络物理系统、大数据和物联网等技术趋势的出现,正在推动对先进终端执行器的需求。通过将计算和决策权转移给机器人系统,有望使用这些先进技术来提高产量,提高效率。
协作机器人的部署不断增长,物流行业中用于拾取和放置操作的机器人的实施增加,传感器成本降低等因素正在促进机器人末端执行器市场的增长。

▲机器人末端执行器-真空吸盘
但是,随着全球关联企业在研发活动上大量资金投入,以使其技术更智能,更符合消费者的需求,其中大部分技术仍在研究中。
机器人末端执行器的市场
在内部物流,机器人末端执行器正广泛应用在食品和饮料行业,这些市场提供诱人的增长潜力。末端执行器和自动导引车(AGV)或自动移动机器人(AMR)协作,非常适合食品制造公司中的物料转移操作。此外,食品工厂还配备了末端执行器来用于饮料瓶装、食品包装、冷藏肉类加工和其他应用。在食品和饮料行业中使用机器人技术的一个重要好处是,它们消除了频繁的手动操作,提高了卫生性和性能。牛奶加工等行业要求更快的操作以确保产品质量和客户新鲜度;因此,高度倾向于自动化过程。甚至在垃圾处理行业,末端执行器也可以配合机械臂,来是被不同类型的物件,进行准确的拣选。

▲内部物流中配置末端执行器的移动机器人

▲机器人末端执行器在触摸屏上绘图
在制造业,末端执行器配合机械臂执行精密装配、焊接等任务。

▲末端执行器在制造业
在物流业,末端执行器可以配合交付机器人装卸货,解决最后一公里。

▲末端执行器和足型交付机器人的配合
在医疗业,末端执行器(手术刀、手术钳、针头等)配合医疗机器人精准替代人类。

▲末端执行器配合手术机器人
在农业,末端执行器可以配合移动机器人来采摘抓取水果和蔬菜,甚至拔出杂草。

▲机器人利用末端执行器来采摘水果
在林业,配置末端执行器-旋转刀具的机器人,可以修剪树干。

▲末端执行器-全自动树木修剪机

▲末端执行器配合机器人锄草、施肥
在体育和娱乐领域,末端执行器可以协助人类体育锻炼和仿真娱乐。

▲欧姆龙公司乒乓机器人
在军事领域,末端执行器配合地面自主移动机器人执行排爆、排雷、抓取和剪除等反恐等任务。
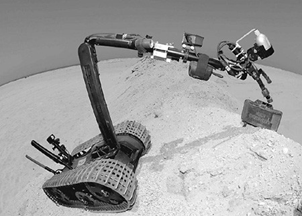
▲排雷机器人的末端执行器

▲末端执行器(真空吸附机)-配合协作机器人爬墙
同样,轻量精细化的末端执行器可以应用在空中。在这个领域,更具想想空间,是一片亟待开发的蓝海市场。

▲无人机执行空中加油就是最典型的末端执行器操作
在海底,配置末端执行器的水下机器人可以从事焊接,打捞、救援、维修和应急等作业。
▲末端执行器维修海底石油管道
根据中国AGV网(www.chinaAGV.com)的不完全统计,全球有近100家公司介入机器人末端执行器市场,它们包括:
ATI、Applied Robotics、Bastian Solutions、Destaco、EMI、FIPA、Festo、Grabit、JH Robotics、Kuka、IAI、Schunk、Robotiq、Weiss Robotics、OnRobot、Piab、Schmalz、RAD、SAS Automation、SMC、Soft Robotics、Zimmer等。
末端执行器可以由抓爪或工具组成。当提到机器人的抓握时,机器人抓爪一般分为四类:
有冲击力的:通过直接撞击物体而物理抓握的颚或爪。
侵入性的:物理穿透对象表面的针,针或(用于纺织品,碳纤维和玻璃纤维的处理)。
有限的:施加到物体表面的吸引力(无论是通过真空,磁粘或电粘附)。
连续的:需要直接接触才能发生粘合(例如胶水,表面张力或冻结)。
这些类别描述了用于在抓取器和要抓取的对象之间实现稳定抓取的物理效果。工业抓手可以采用机械、抽吸或磁性方式。真空杯和电磁体主导着汽车领域和金属板的处理。伯努利夹持器(Bernoulli grip)利用了夹持器与零件之间的气流,其中,提升力使夹持器和零件彼此闭合(使用伯努利原理)。伯努利抓爪是一种非接触式抓爪。物体保持在抓具产生的力场中,而没有直接接触抓具。伯努利抓爪已在光伏电池处理,硅片中采用处理,以及纺织和皮革行业。在宏观尺度(零件尺寸> 5mm)上,其他原理较少使用,但是在最近十年中,已证明在微处理中有有趣的应用。其他采用的原理包括:基于静电电荷(即范德华力)的静电夹具和范德华夹具,基于液体介质的毛细管夹具和低温夹具,以及超声波夹具和激光夹具,这两种都是非接触式抓取原理。静电抓手利用抓手与零件之间的电荷差(静电力)通常由抓取器本身激活,而范德华抓取器基于抓取器分子与对象分子之间的原子吸引作用力较低(仍然是静电)。毛细管夹具使用夹具和零件之间的液体弯月面的表面张力来使零件居中,对齐和抓紧。低温抓取器会冻结少量液体,由此产生的冰提供必要的力来提起和搬运物体(该原理也用于食品处理和纺织品抓取中)。超声波夹持器更加复杂,其中压力驻波用于提起零件并将其捕获在一定水平上(悬浮的例子既在微观层面上,在螺钉和垫圈处理中,又在宏观层面上,在太阳能电池或硅晶片处理中),并且激光源,其产生的压力足以捕获并移动液体介质(主要是细胞)中的微零件。激光夹具也被称为激光镊子。
摩擦/颚爪的特定类别是针爪。这些被称为侵入式抓爪,将摩擦力和闭合形式都用作标准机械抓爪。
最著名的机械抓取器可以是2个,3个或甚至5个抓爪。

▲末端执行器-章鱼手
可用作工具的末端执行器有多种用途,包括装配中的点焊,需要均匀涂装的喷涂,以及对人体造成危险的其他目的。手术机器人具有专门为此目的制造的末端执行器。
夹爪工作机制
机器人抓握的一种常见形式是强制闭合。通常,夹持机构是由夹持器或机械手指完成的。两指式夹持器通常用于在不太复杂的应用中执行特定任务的工业机器人。[需要引用]手指是可更换的。两指抓取中使用的两种机制会说明要抓取的表面的形状以及抓取物体所需的力。手指的抓握表面的形状可以根据要操纵的物体的形状来选择。例如,如果将机器人设计为举起圆形物体,则抓具表面的形状可能是其凹形印象,从而使抓握效率更高。对于正方形,表面可以是平面。
机器人抓握物体所需的力
尽管有许多作用在机械臂上的力作用在身体上,但主要力是摩擦力。握持表面可以由具有高摩擦系数的软质材料制成,从而不会损坏物体的表面。机器人抓取器不仅必须承受物体的重量,还必须承受因物体频繁运动而引起的加速度和运动。为了找出握持物体所需的力,使用以下公式:

F是 握住物体所需的力,
M是 物体的质量,
ɑ是 物体的加速度,
U是 摩擦系数和,
N是 抓爪中的手指数。
一个更完整的方程式将说明运动方向。例如,当物体抵抗重力向上移动时,所需的力将大于朝向重力的力。因此,引入了另一个术语,公式变为:

在这里,g为重力引力,a是运动引起的加速度。
对于许多物理交互操作任务,例如书写和操作螺丝刀,可以应用与任务相关的抓取标准,以便选择最适合满足特定任务要求的抓握。提出了几种面向任务的抓握质量度量标准,以指导选择满足任务要求的良好抓握。
例子
流水线机器人的末端执行器通常是焊接头或喷漆枪。手术机器人的末端执行器可以是一个解剖刀或在外科手术中使用的其它工具。其他可能的末端执行器可能是机床,例如钻头或铣刀。航天飞机机械臂上的末端执行器使用一种金属丝图案,这些金属丝像相机的孔一样围绕手柄或其他抓握点闭合。末端执行器的示例

▲基本的力闭合式末端执行器的示例

▲点焊末端执行器

▲激光焊接末端执行器

▲在太空中使用的维修和观察末端执行器(Canadarm2闩锁末端执行器)

▲在复制人用力闭合式末端执行器方面进行的高度复杂的尝试
附录:
伯努利抓手(Bernoulli grip)
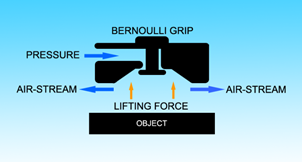
▲空气流动会在物体上产生提升力,从而实现非接触式附着
一个伯努利抓手其用途是通过气流改变气压差差生吸附力来接触被抓取的对象。这种抓手依靠伯努利气流原理。高速气流的静压低。通过精心设计,高速气流中的压力可以低于大气压。这会在局部压力较低的一侧的法线方向上对对象产生合力。伯努利抓取器通过在抓取器表面保持与环境压力相比的正压力来利用此优势,同时在抓取器和被夹持物体之间保持气隙(非接触)。
商用伯努利抓手通常用于处理硬质片状材料,例如硅晶片在电路板的制造,或光伏电池组件。由于握持件是非接触式的,因此这种握持形式适合于处理无菌材料,以防止化学和/或生物污染。已经进行了有关在食品加工过程中使用伯努利夹持器运输样本食品的研究,尽管这项工作发现困难,因为柔性食品会振动紧靠抓具,变形并交替阻塞抓具,或者被吹离气道。伯努利抓地力也正在被研究为攀岩机器人的非接触式粘附机制。
(备注:(以上部分资料来自维基百科)
相关资讯
更多- AGILOX × 上交会 | 6.11-13
- 中国AGV网上周热点回顾(2026年6月1日-6月6日)
- “一带一路 出海向新丨中叉网/AGV网2026亚欧大陆万里行” 圆满收官
- 第三届中国工业车辆和移动机器人“金力奖”颁奖盛典圆满落幕
- 中国AGV网上周热点回顾(2026年5月25日-5月30日)
- 中叉网/AGV网网将再度亮相LET 2026,共筑智慧物流新未来
- 中国AGV网上周热点回顾(2026年5月18日-5月23日)
- 中国AGV网上周热点回顾(2026年5月11日-5月16日)
- 中国AGV网上周热点回顾(2026年4月27日-5月2日)
- 中力股份2025年报:加码数智移动机器人,经营稳进与战略定力并显