干货丨镭神在2017中国ADAS与自动驾驶论坛
转载 2017-06-01 09:22 镭神 来源:镭神
2017年5月25日,中国ADAS与自动驾驶论坛在上海颖奕皇冠假日酒店隆重召开,大会聚焦激光雷达,双目摄像头,高分辨率毫米波雷达,底盘执行器,嵌入式深度学习系统,高精度地图,自动驾驶测试,ADAS测试等等最热门话题,业内大牛与大家分享,都是满满的干货,绝无那些假大空的陈词滥调。
镭神也参加了此次论坛,并为现场观众带来了一场精彩报告~
没有去现场也没关系,下面小编就用图文并茂的方式带大家回顾下~

今天我们带来的演讲题目是《激光雷达与ADAS配合的应用》(只看题目就知道干货满满)。
研究表明,74%的车辆事故是由于驾驶员的疏忽造成的,提前1.5秒的警示可以减少90%的前追尾碰撞,因此,安全驾驶辅助系统的重要性不言而喻。

那么激光雷达怎么运用到ADAS中并发挥其优势?
镭神激光雷达ADAS解决方案的场景功能定义为三个阶段:
A阶段
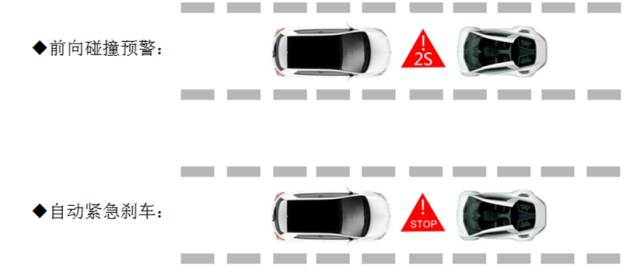
以雷达(镭神单线 80m)的平台载体,对车辆正前方障碍物进行检测跟踪,实现前向碰撞预警(Forward Collision Warning)和自动紧急刹车(AutonomousEmergencyBraking)。首先关注于车辆正前方向的测距与防碰撞预警合并使用刹车辅助装置,已期达到减速、制动或半自动报警等功能之实现。预警分为两种模式:一是距离预警,通过 OBD 读取本车当前时刻的车速信息,根据不同车速设置不同的预警距离阈值;二是时间预警,通过计算自车与前方障碍物当前时刻的相对距离以及相对速度,计算出几秒后会发生碰撞,根据碰撞时间来设置预警。此阶段价格最低,只能用于前方测距预警等功能且多用于乘用车现阶段之使用。缺点是功能单一,受雷达的自身缺陷的影响,在特定路况环境发生时,比如在自车未上坡前,由于单线雷达固定安装在车体上,对处于坡道上的障碍物无法检测。在雨雪雾天气下,也会影响检测效果,安全系数会有所降低。
B阶段
多传感器融合+车联网(V2X 来传递交通灯的信号、车道信息、前方道路情
况,这样将会减少对传感器的依赖程度,增强对环境的适应性)是未来的趋势。激光雷达(单线或多线)配合毫米波雷达、超声波和摄像头,各个传感器之间互取所长,相互融合,功能互补,可实现前向碰撞预警(Forward Collision Warning)、自动紧急刹车(Autonomous Emergency Braking)、自适应巡航控制(AdaptiveCruiseControl)、车道偏离预警(Lane Departure Warning)、车道保持(Lanechange
Dssistance)、行人碰撞预警(Pedestrian Collision Warning)、盲点探测( Blindspotdetection)、全景影像系统(Surround View Monitor )等 ADAS 主要功能 。采用视觉识别车道线时配合激光雷达返回的光强信息可提高检测的准确率。摄像头主要用来识别障碍物属性(目前主要识别车辆和行人),通过匹配激光雷达数据给出障碍物的方位、距离、速度、大小信息,最终通过决策算法处理使车辆发生的碰撞机率大大降低,但是对决策判断(处理器、算法)等要求较高。对于环境感知(视觉传感器)的图像拼接或采用景深拼接均有较大的要求。因此对避险执行(执行零部件/人工操作、优先级、可靠性)都应考虑在内。但各大车厂的要求不一样,整个系统的配置也会有不同的区别。B 阶段的性能优于 A 阶段。但成本会高出 1/3 多。因此我们认为比较适合乘用车及商用车的单车配套较为适应。
C阶段
针对长轴牵引车辆在国家严格限重的大环境治理下,未来在高速路上的大牵引车会越来越多。因此,做好牵引拖车的安全驾驶辅助系统是当务之急。

下面插入几段镭神智能ADAS解决方案路测视频:
测试一:天气晴朗,人多的路口,测试对象为行人。
测试二:公路,测试对象为车辆检测+车道线。
最后,镭神智能不仅仅只是一家做激光雷达和灭蚊机器人的公司,持续关注我们,会有惊喜哦~
相关资讯
更多- 邀请函 | 华睿科技机器视觉生态大会·杭州站
- 新华社权威关注|AITEN 聚焦工业真实场景,让智能智造落地千行制造
- 高温高湿下,电池如何安然度夏?
- 合力 |【奋斗者说】第九期:先锋·引领
- 产能全面跃升!德马未来超级工厂投产,激活全球项目履约新动能
- AGV和RGV有何区别?
- 10款叉车同步更新:Manitou以锂电与内燃双路线重构工业车辆产品组合
- Brightpick与TREW建立合作:货到人机器人与北美系统集成能力加速结合
- Dexterity与Kawasaki扩大合作:Physical AI开始瞄准高强度仓储装卸
- Rockwell推出FactoryTalk Orchestration:把机器、人员和物料移动纳入统一编排