工业机器人运动空间位置的确定
转载 2019-08-22 09:40 库比克 来源:库比克工业集团
我们伸手去拿一个东西,似乎不需要准确告诉手要伸多长距离手臂转多大角度,反正在触手可及的范围内伸手过去拿过来就可以了,对机器人可就没那么简单了,要去拿一个物件,要准确定义物件的空间位置,这样才能让机器人按既定的程序伸到所需的位置,空间位置的定义,就是坐标。机器人程序中所有点的位置都和坐标系关联,同时这个坐标系也可能和另一个坐标系关联。
机器人的各种坐标系都由正交的右手定则来决定,如图1所示。当围绕平行于X 、Y 、Z 轴线的各轴旋转时,分别定义为A 、B 、C 。A 、B 、C 的正方向分别是X 、Y 、Z 正方向上右手螺旋前进的方向(见图2)。
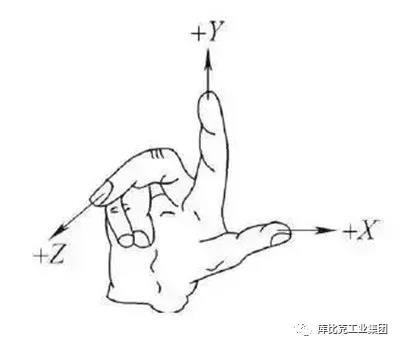
图1 右手坐标系
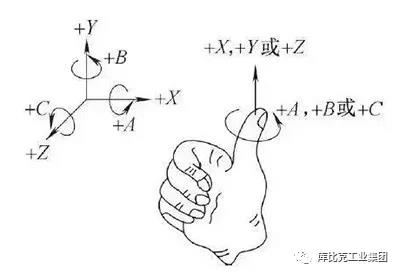
图2 旋转坐标系
常用的坐标系是绝对坐标系、机座坐标系、机械接口坐标系和工具坐标系。
(1)绝对坐标系与机器人的运动无关,以地球为参照系的固定坐标系(见图3),符号为O0、X0、Y0、Z0。原点O0、X轴正方向由用户根据需要来确定;+Z轴与重力加速度的矢量共线,通俗的说就是Z轴垂直于地面,但方向相反。
(2)机座坐标系是以机器人机座安装平面为参照系的坐标系,符号为O1、X1、Y1、Z1。原点O1由机器人制造厂规定;+Z1轴垂直于机器人机座安装面,指向机器人机体;X1轴方向由原点指向机器人工作空间中心点Cw(见GB/T12644—2001)在机座安装面上的投影。当由于机器人的构造不能实现此约定时,X1轴的方向可由制造厂规定。
(3)机械接口坐标系是以机械接口为参照系,符号为Om、Xm、Ym、Zm。原点Om是机械接口的中心;+Zm轴的方向垂直于机械接口中心,并由此指向末端执行器;+Xm轴由机械接口平面和X1、Z1平面(或平行于X 1、Z 1)的交线来定义,同时机器人的主、副关节轴处于运动范围的中间位置。当机器人构造不能实现此约定时,应由制造厂规定主关节轴位置。+Xm轴的指向远离Z 1轴。
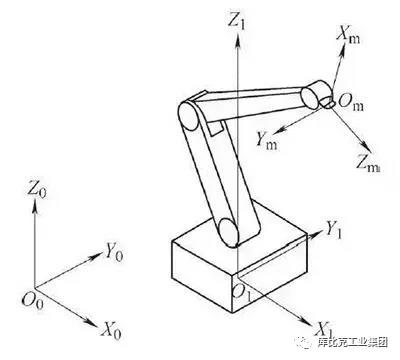
图3 坐标系示例

图4 工具坐标系
(4)工具坐标系以安装在机械接口上的末端执行器为参照系(见图4),符号为Ot、Xt、Yt、Zt。原点Ot是工具中心点;+Zt轴与工具有关,通常是工具指向;在平板式夹爪型夹持器夹持时,+Yt是手指运动平面的方向。
相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT