【仙知小课堂】仙知网络协议API使用教程(九)
转载 2019-11-15 08:57 Seer Robotics 来源: 仙知机器人Seer
为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。之前分别介绍了仙知网络协议API的概念、类别、使用教程及如何查询机器人状态API中的“机器人信息”和“机器人运行信息”等,本期将介绍“如何查询机器人定位状态”、“如何查询机器人地图载入状态”及“如何查询机器人扫图状态”:
如何查询机器人定位状态
查询机器人定位状态
请求
编号: 1021 (0x03FD)
名称: robot_status_reloc_req
描述: 查询机器人当前的定位状态
JSON 数据区: 无
请求示例

响应
编号: 11021 (0x2B0D)
名称: robot_status_reloc_res
描述: 查询机器人当前的定位状态的响应
JSON 数据区: 见下表
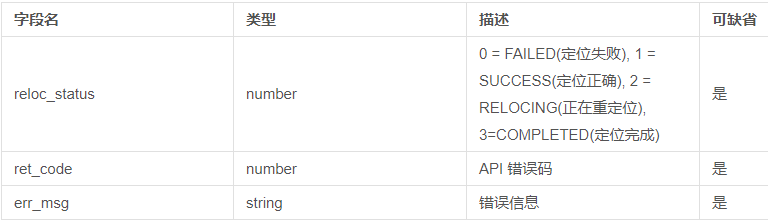
注意:定位状态 (1021) 用于指示当前机器人定位状态是否正确,定位状态如果为 COMPLETED, 说明重定位已经完成,但是用户没有确认,此时需要通过 (2003) 来进行确认或重新进行定位。用户确认定位正确后,定位状态会变为 SUCCESS。
响应示例

如何查询机器人地图载入状态
查询机器人地图载入状态
请求
编号: 1022 (0x03FE)
名称: robot_status_loadmap_req
描述: 查询机器人当前地图载入状态
JSON 数据区: 无
请求示例

响应
编号: 11022 (0x2B0E)
名称: robot_status_loadmap_res
描述: 查询机器人当前地图载入状态的响应
JSON 数据区: 见下表
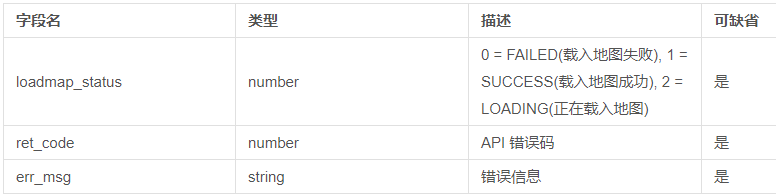
注意:地图载入状态 (1022) 用于指示当前地图是否载入成功,当机器人刚启动或者发生切换地图操作时,地图载入状态会指示为 LOADING,此时无法进行重定位操作,必须等地图载入状态变为 SUCCESS 后才能进行重定位。
响应示例

如何查询机器人扫图状态
查询机器人扫图状态
请求
编号: 1025 (0x0401)
名称: robot_status_slam_req
描述: 查询机器人当前的扫图状态
JSON 数据区: 无
请求示例

响应
编号: 11025 (0x2B11)
名称: robot_status_slam_res
描述: 查询机器人当前的扫图状态的响应
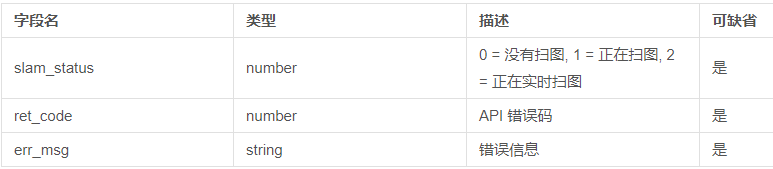
JSON 数据区: 见下表
响应示例

相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT