本文带你了解AGV的导航方式
转载 2020-04-03 14:36 迦智机器人 来源: 迦智机器人
随着AGV智能物流机器人的应用越来越广泛,如何选择合适的AGV产品就成为了用户迫切需要了解的问题。其中,导航方式作为AGV的一项核心技术,更是受到了广泛关注。本文就对当下AGV应用的几种不同导航方式进行梳理,以期能够给大家提供帮助。
目前,常见的AGV导航方式主要有以下几种,分别有着不同的适用场景和特点:
磁条导航
在路面上铺设磁条,通过磁导航传感器不间断感应磁信号来实现AGV的导航。
优点为技术成熟可靠,成本较低,铺设实施较为简单。缺点是要提前施工;磁条容易受损和污染,需定期维护;且AGV行驶路线无法便捷调整,灵活性差。
磁钉导航
同样是通过磁导航传感器感应磁信号来进行导航,不同的是将之前的磁条连续感应替代为磁钉间隔感应,AGV行进路径由磁钉连线确定。
优点为技术成熟可靠,成本较低;隐蔽性较好,不易被损坏。缺点是需提前开凿预埋,施工成本高;灵活性差,后期变更成本高;磁钉间隔区域存在不稳定性,不适应人机共融环境;且在重载场景下,磁钉容易被损坏,更换困难。
二维码导航
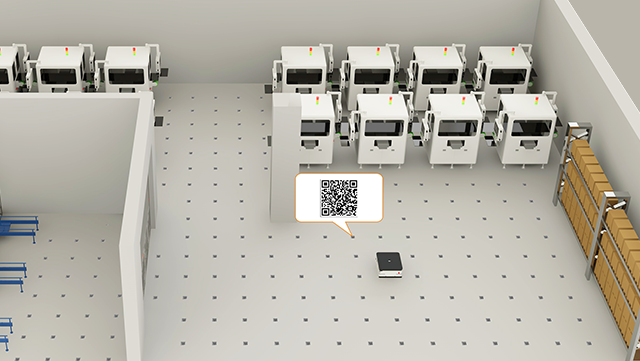
由二维码替代磁钉的导航方式,典型应用为亚马逊kiva机器人,实现了“货到人”的拣选模式。
优点为AGV运行准确,铺设成本低,路径调整较为方便;不足之处在于二维码容易污损,需定期维护;应用柔性低,无法适应人机共融环境;同时对作业环境(如无尘室)和地面平整度等客观条件有一定要求。
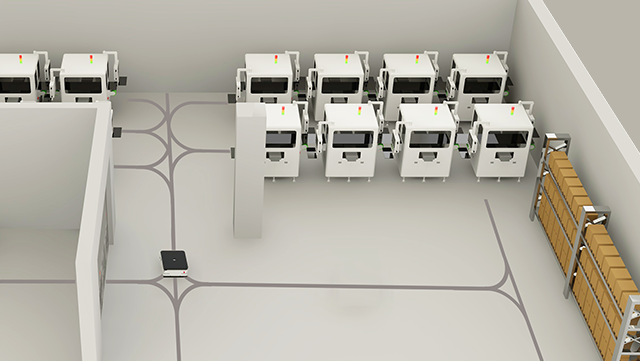
激光反射板导航
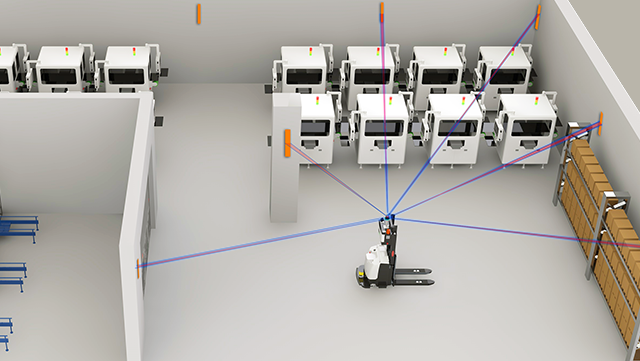
在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。
优点为地面无需施工,AGV行驶路线灵活。不足之处在于需要提前按照一定要求铺设反射板,成本较高;适用于周边无遮挡的作业环境。
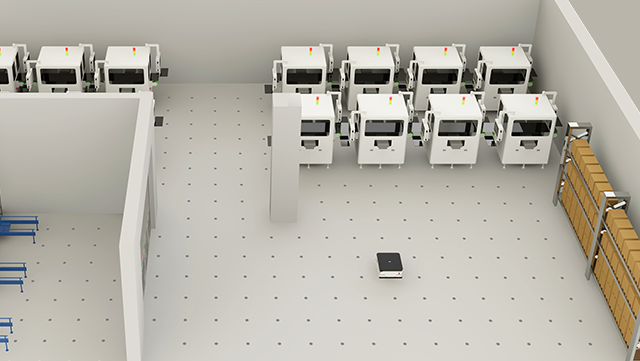
激光SLAM导航
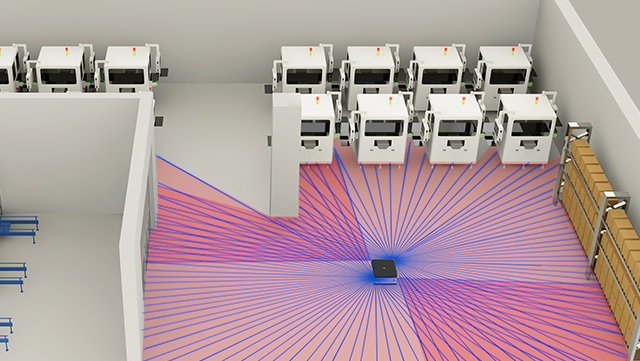
无需二维码、反射板等辅助导航标志,而是通过工作场景的自然环境(比如柱子、墙面等)作为参照物,实现定位导航。
优点在于无需硬件施工,部署成本低;且能够实现灵活的停障避障和人机共融作业;AGV行驶路径灵活多变,并可通过软件进行动态编辑,满足柔性生产需要;但在应用中也存在一些弊端,比如在高动态或类似透明、镜面等环境中作业时,容易出现定位丢失的情况。
迦智激光SLAM导航
可靠性更高 适应性更强 精度更优秀
迦智激光导航融合了各类导航技术优势,在运行过程中可根据需要随时自主切换导航方式,自动穿梭在不同生产环境和工序之间,实现用户毫米级高精定位需求的同时,大大提高了AGV的运行范围和稳定性。
支持更大尺寸地图
迦智激光导航AGV采用分布式地图存储方式,突破了传统导航技术对适配地图尺寸的限制,高效实现了厂区环境地图的有效存储、管理和共享。在该技术支持下,迦智AGV可以轻松实现单张地图4万平方米以上厂房面积内的人机共融作业,具备了超高的适应性、稳定性和鲁棒性。
更适宜人工操作
通过迦智自研算法的加持,迦智AGV在实际作业中,能够自动识别货架、码头等生产设备的准确位置进行对接,避免了因人工操作误差而带来的各项损耗,稳定了AGV系统的运行效率,大幅提高了生产效率。

迦智激光SLAM导航
AGV的性能特点和优势

当下,迦智的激光无轨导航AGV已经在包括电子信息、汽车与汽配、电力成套、医药、新能源、纺织服装等多行业有了成熟的应用案例,助力企业精益生产管理,提升运作效率,真正实现智能工厂。
相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT