叉车AGV硬件模块 - L14/L16堆高车
转载 2020-06-04 14:00 苏州睿斯博特机器人 来源: 苏州睿斯博特机器人
更换林德的驱动器系统,常见的驱动器品牌有柯蒂斯和ZAPI,然后基于CAN协议来操控驱动系统,实现无人驾驶;
第一种方案,可靠性高,但是科尔摩根NDC有门槛,所以主要以AGV大厂为主;第二种比较简单,但是由于电位计漂移等缺陷,造成重复定位精度低,可靠性低,已经开始被淘汰;第三种方案,可以配置按照项目需求配置不同的导航方式,缺点在于开发难度高和改造工时长。
基于市场需求,我们开发了林德L14/L16叉车AGV硬件模块。

模块构成示意图
产品基于美国柯蒂斯1232E+1253C+1220CAN驱动解决方案,其中柯蒂斯1232E符合ISO 13849-1安全等级要求。通过在转向部分追加一个中位接近开关,可以实现舵轮复位,并且客户可以通过林德原装舵杆进行手动操控。

车身布局图片
其中起升系统采用美国柯蒂斯1253C泵控驱动器,并且搭配林德自身的比例阀,实现上升泵控/下降比例的精准控制。货叉的高度测量采用德国SICK的BCG08拉绳编码器,CANopen通信协议,可以精准测量货叉的起升高度。

拉绳编码器安装图片
产品线束采用标准制程的车规线束,端子采用车规TE AMP端子,非防水端子均有硅胶密封,具有布线美观,检测方便,防错防呆的优点。

线束实物图
除了驱动系统改装完毕外,可以按照CR/CE等安全认证要求,选配AGV叉车安全套装。
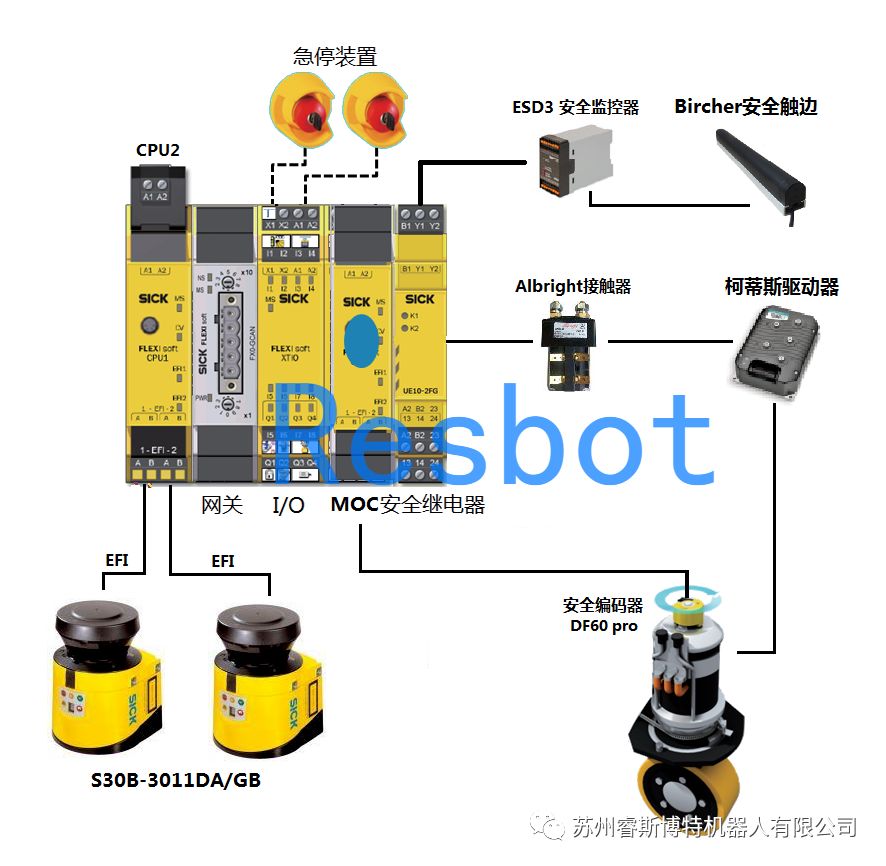
安全套件配置示意图
目前AGV叉车常见的导航方式主要有反射板导航和自然导航,我们的模块可以选配德国SICK NAV LOC导航套件、浙江科聪MRC5000导航控制器、上海仙知SRC导航控制器等国内外主流的导航控制系统。
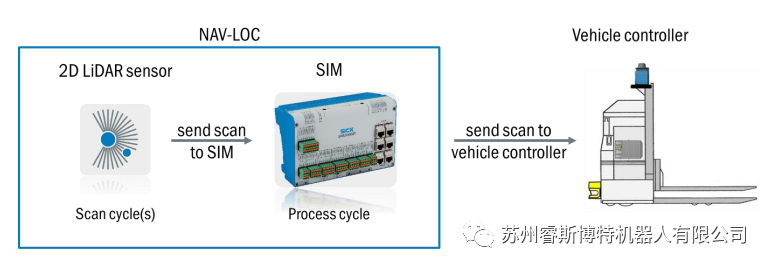
德国SICK NAV LOC导航套件
除了了以上常用模块可以选配外,我们可以按照客户现场需求,可以选装栈板识别、安全警示灯、二维码辅助定位的模块,助您更快推出有竞争力的叉车AGV产品。
相关资讯
更多- 优必选正式发布轮式工业人形机器人Cruzr Y1,首秀OPPO供应链技术展
- 不到3个月再破里程碑!智元第15000台具身机器人下线,创下全球量产新纪录
- 全球首发!牧星四向穿梭车系统亮相澳洲,开启高密度存储新时代
- 智行视界2026 | 深圳首站告捷,今年有何不同?
- 为什么越来越多企业开始关注叉车属具的全生命周期成本(TCO)?
- 慧眼识微,智行无界 | 华睿科技邀您莅临上海AMTS汽车制造展
- 合肥搬易通上海营销服务中心正式运营,聚焦窄通道叉车和AGV本体
- 理性与温度的共生:PUDU D7工业级类人形机器人的进化美学
- 迦智科技出海记|美国 AUTOMATE 2026 × 澳洲 CeMAT AU,双城智造行
- 仙工智能创始人赵越:以真机数据飞轮,开启具身基础设施时代