机器人地轨的功能介绍
转载 2020-06-23 20:18 库比克工业集团 来源:库比克工业集团
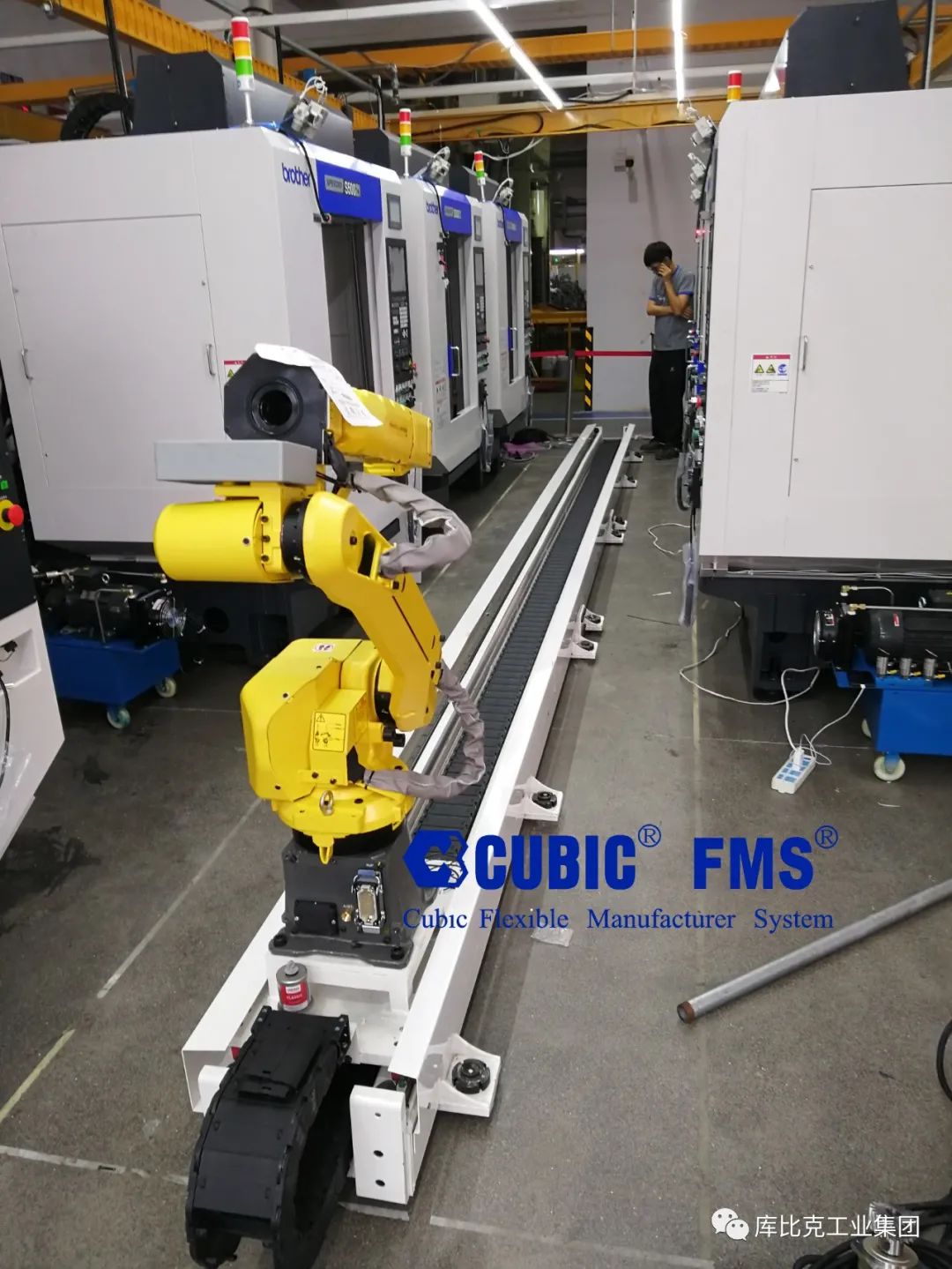
工业自动化中,工业机器人逐渐被应用于生产的各个环节,替代人工作业,促进了自动化生产的进程。而机器人地轨作为机器人的一个行走辅助机构,也快速发展起来,在一些空间复杂、工件大的场合应用广泛。
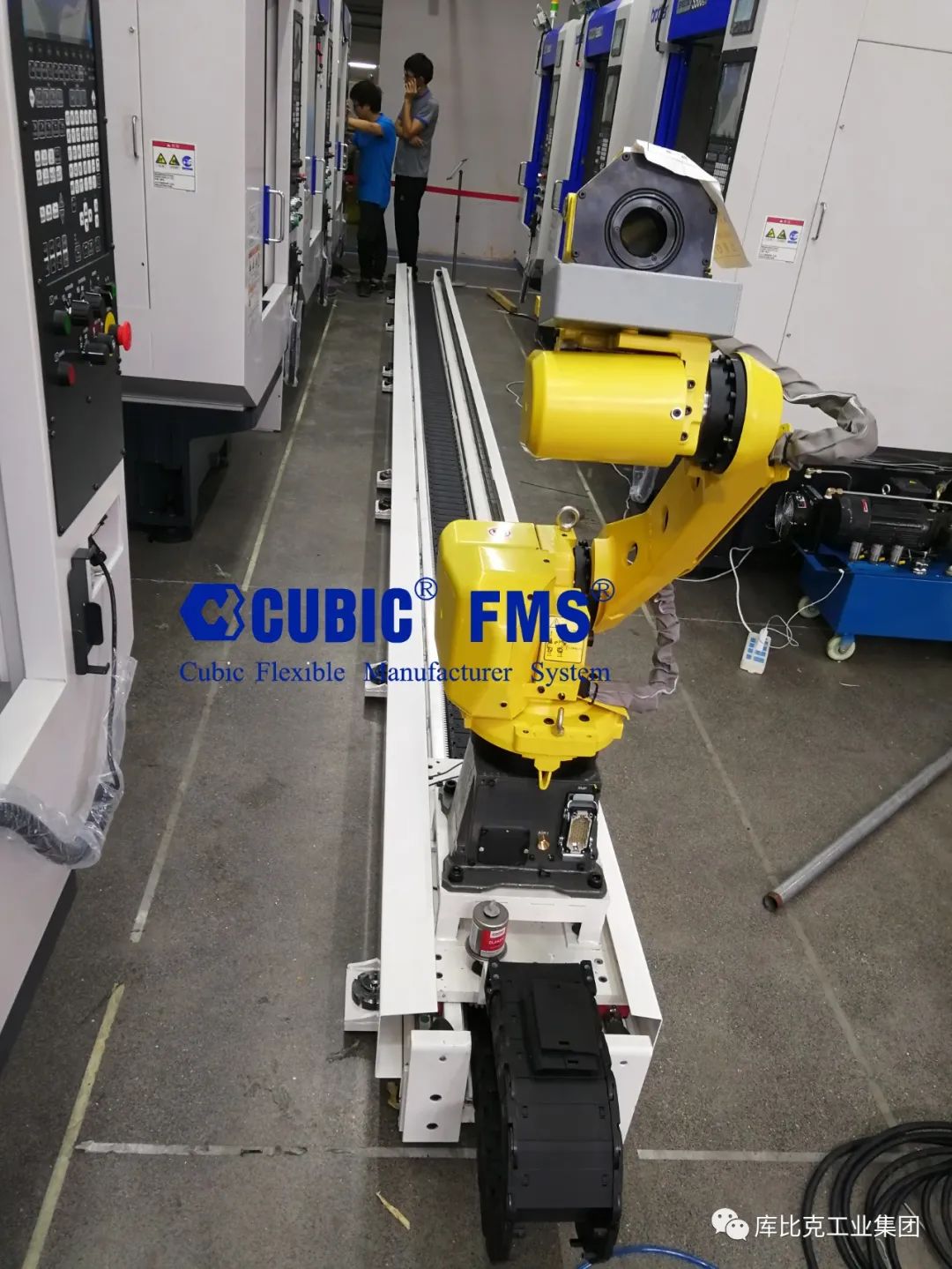
机器人地轨主要是带动工业机器人按指定路线进行移动,扩大机器人作业半径,扩展机器人使用范围功能,进一步提高机器人使用效率,降低机器人使用成本,实现全面自动化生产。
地轨作为执行机构,具有控制方便、执行动作灵活、可实现复杂的空间轨迹控制的特点,如下是机器人地轨的系统功能。
1、系统程序控制:地轨系统与“模架”的信号接口及系统接口全部都是采用数字信号传输,从而保证互相之间的稳定性及牢靠性。具备手动和自动两种运转控制方式, 手动方式下可单独操作某一个工位,自动方式下按设定的运转程序自动运转。
2、软件功能作用:随机发起工作信号,七轴可以依据发起的先后顺序依次完成工作;并且在信号复位后可以肃清掉一切未执行的信号。
3、急停连锁功用:随意激起任何一个急停按钮,七轴机器人可以立刻中止正在完成的动作,只要在该急停重新复位后设备才恢复正常运转。
4、信号安全性:在较短的时间内连续给出两次信号,机器人行走轴只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
5、移动与定位:可经过操作面板及显现屏直接编辑,理论上在直线轴有效行程范围内,能够设置无数个定位点。位置精度由编码器准确检测,经过伺服系统控制电机保证,精度在±0.5mm范围之内。
6、安全保养及维护:外用钥匙维护开关,当某个模架不用时(如:某个模架呈现毛病需维修),采用外用钥匙维护开关跳过此模架,这样不会由于人为的误操作或其他的不测而造成产品的报废。
7、急停按钮:每台模架具备在紧急状况时中止整个系统的急停按钮。
8、系统接口:一切硬件接口和软件功能由提供方对接,保证所有客户的需求。
相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT