技术干货|AGV舵轮驱动悬挂系统机构
转载 2020-07-02 10:54 凤凰动力 来源: 凤凰动力
随着AGV机器人(Automated Guided Vehicle)的不断发展和演化,AGV的驱动行走方式也是多种多样,最终驱动系统以驱动轮+从动轮的结构以其简单、移动速度快、运行平稳、成本低等优势成为移动机器人的应用主基调。
AGV舵轮-减震-悬挂-缓冲系统-机构种类
电驱动总成-【舵轮】-运动视频赏析
【AGV驱动轮减震悬挂系统常见形式】
AGV移动机器人是机器人家族中的一个重要的分支,也是进一步扩展机器人应用领域的重要研究发展方向。自上世纪九十年代以来,人们广泛开展了对机器人移动功能的研制和开发,为适应各种工作环境的不同要求而开发出各种移动机构。其中【凤凰动力】电驱动-舵轮可以实现高精确定位、原地调整姿态和二维平面上任意连续轨迹的运动,具有一般的轮式移动机构无法取代的独特特性,对于全向移动机器人的自由行走具有重要意义。
通常情况下AGV底盘配轮采用3轮结构【单驱动】、4轮结构【双驱动】、5轮结构【单驱动】、6轮结构【双驱动】,采用辅助万向轮和驱动轮搭配的方式,辅助万向轮起到承载和从动的作用,驱动轮主要起到牵引和驱动的作用。

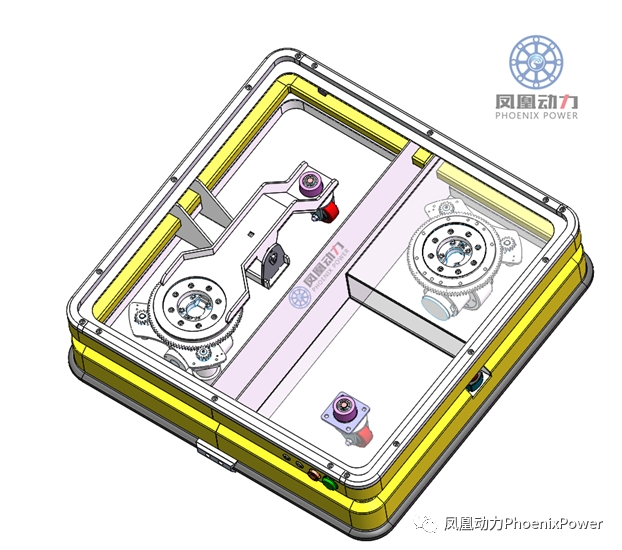
【方案一】
在AGV的作业环境中,路面的不平会导致驱动轮悬空或打滑,致使AGV失去动力或被顶起。减震悬挂缓冲装置结构中的弹簧会使驱动轮始终与地面贴紧,遇到凸起路面时,由于驱动单元的浮动性以及弹簧的可压缩性,可避免驱动单元带动AGV整体被顶起。弹簧的反作用力使驱动轮始终与地面贴紧,地面也时刻提供驱动轮牵引所需的摩擦力与附着力,保证了AGV不会因路面不平而失去动力。

【方案二】
AGV驱动舵轮的减震悬挂缓冲系统结构主要是解决AGV在复杂路面上行驶的适应性,使得底盘轮系共同着地,避免因地面不平整带来的驱动轮悬空或附着力不够出现主动轮打滑的现象。

【方案三】
通过减震悬挂结构来实现多轮共同着地问题,保证了AGV的驱动力外,辅助轮从动轮也分担了大部分的承载。

【方案四】
AGV不同轮系布局中,为保证驱动轮与地面接触有足够的附着力和摩擦力,一般情况下一定是要加装减震悬挂缓冲系统来克服地面不平带来的不稳定性。
【方案五】
AGV的主要轮系布局包含差速布局和舵轮布局,针对其底盘轮系布局的型式不同,其减震缓冲机构的结构也要有不同的方式,同样车型和承载重量不同,驱动形式也有所不同,因车型而定。
配置了【凤凰动力】电驱动-舵轮可实现零回转半径、侧移、全方位无死角任意漂移。可实现二维平面内的任意方向的移动功能,包括直行、横行、斜行、任意曲线移动、原地360°等全向移动形式。整体性能优于传统其他结构形式的AGV小车,【凤凰动力】舵轮AGV小车解决方案结构简单,控制简易,便于维护,寿命更长。
相关资讯
更多- 邀请函 | 华睿科技机器视觉生态大会·杭州站
- 新华社权威关注|AITEN 聚焦工业真实场景,让智能智造落地千行制造
- 高温高湿下,电池如何安然度夏?
- 合力 |【奋斗者说】第九期:先锋·引领
- 产能全面跃升!德马未来超级工厂投产,激活全球项目履约新动能
- AGV和RGV有何区别?
- 10款叉车同步更新:Manitou以锂电与内燃双路线重构工业车辆产品组合
- Brightpick与TREW建立合作:货到人机器人与北美系统集成能力加速结合
- Dexterity与Kawasaki扩大合作:Physical AI开始瞄准高强度仓储装卸
- Rockwell推出FactoryTalk Orchestration:把机器、人员和物料移动纳入统一编排