如何打造机器人“黄金比例”?
转载 2020-08-01 16:06 优必选科技 来源:优必选科技
你知道Walker为什么会这么“健硕”吗?「AI大咖说」第三期,一起走进大型仿人机器人的“骨骼”奥秘。
从前,仿人机器人只是简单地模拟人或机器的某个动作,现在,仿人机器人的运动步态包含步行、跳跃、踢球、上下楼梯:

Walker踢足球涉及到多项复杂技术连“开车上路”都难不倒:

日本东京大学团队进行机器人驾驶汽车的研究挑战
这一切的实现离不开机器人的结构设计和制造,也就是今天的重点课题——整机构型。整机构型对仿人机器人来说到底有多重要?今天跟着AI因斯坦·琨的脚步,秒变机械达人▼
通过视频,我们知道了仿人机器人的机械部分类似于人类骨骼,决定着体型、神经功能、关节活动。
什么是机械部分整机构型
在说整机构型之前,我们先来了解一下:仿人机器人的机械部分。仿人机器人主要由三大部分组成,分别是机械部分、控制部分、传感部分,其中机械部分就像“地基之于高楼大厦”,是其它部分的重要基础。
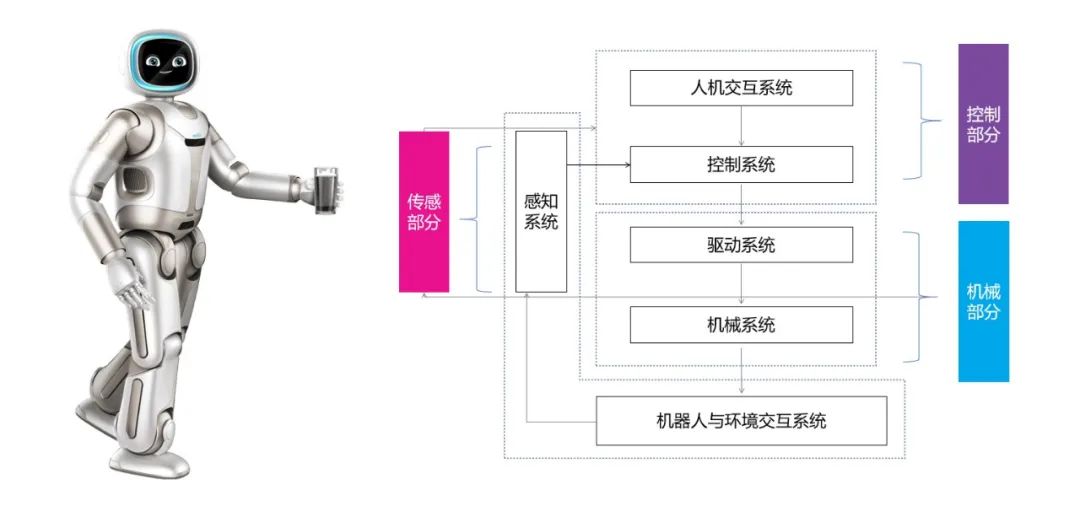
按系统分类,机械部分包含驱动系统和机械系统两个子系统。按部位分类,机械部分又可以分为头、胸腔、手臂、手、腿和足等。
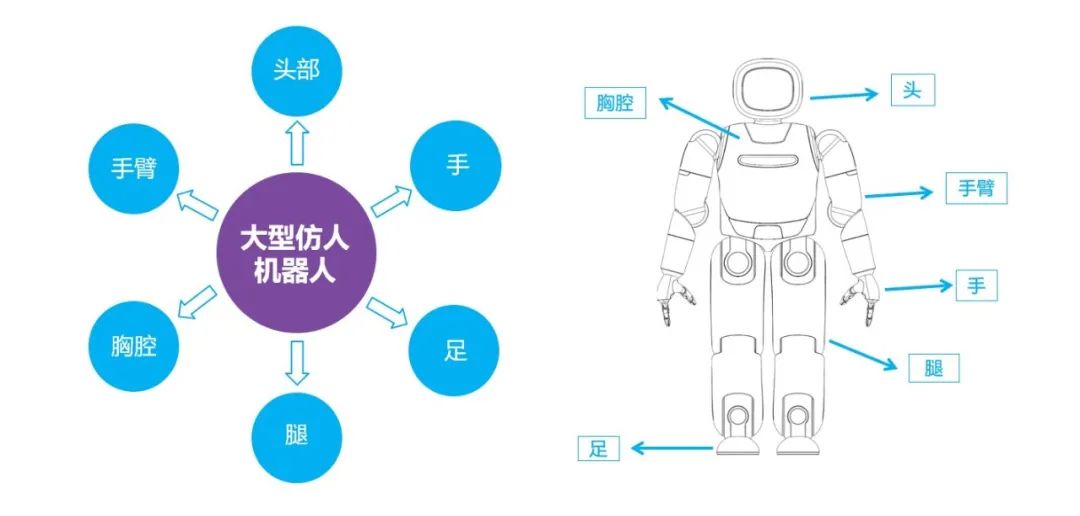
仿人机器人机械部分的部位分类
作为机械部分的关键点之一,整机构型与关节的数量及布置方式紧密相关。一般成年人的骨头有206块,大的关节有78个,而仿人机器人模拟人类的关节和骨骼架构,通常有15-70个关节。
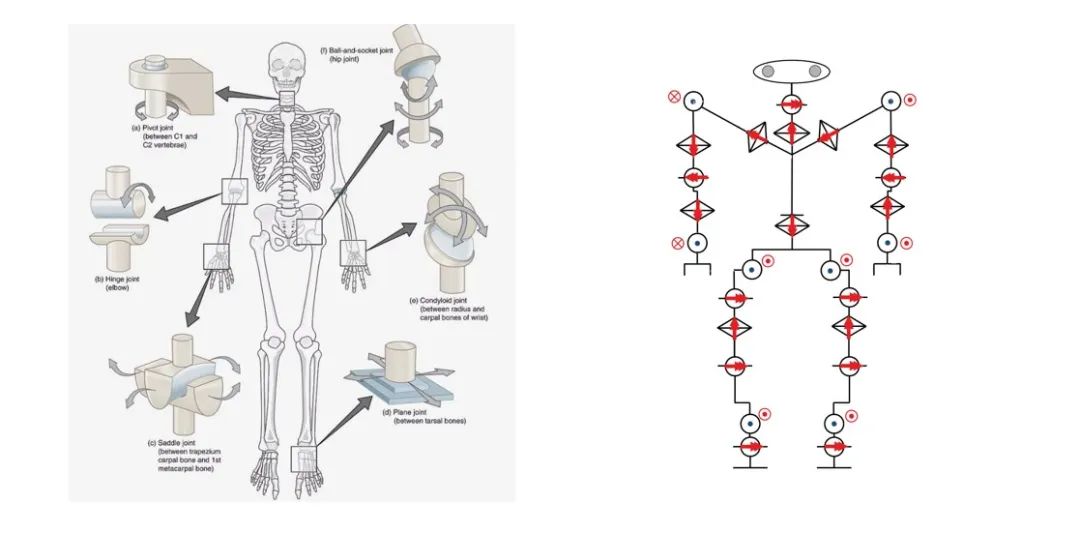
人体关节类型分布vs一般大型仿人机器人关节类型分布
仿人机器人通常头部有1~3个关节,手臂有4~7个关节,腿部有6~7个关节,手部有2~13个关节。
整机构型的重要性
进行整机构型的研究应用,是一项极具挑战性的工作,对机器人设计的成功至关重要,备受国内外机器人团队关注。
❏ 国外研究现状




左右滑动查看更多>>
❏ 国内研究现状


通过国内外的研究现状对比,可以看到整机构型对于仿人机器人具有十分重要的意义▼
① 整机构型对机器人的运动性能有重要影响:
LOLA机器人做了多种大腿和小腿的结构比较,最后从中选优,其目的是通过构型的改变提高机器人运动性能。
② 减少机器人重量和腿部转动惯量对提升机器人的运动性能有帮助:
Digit机器人将膝盖伺服驱动器上移到大腿,踝关节伺服驱动器上移到小腿,减少腿部转动惯量,步行速度明显提升。
③ 增加腿部弹性机构可以减少机器人行走冲击力和储能:
Digit机器人减少腿部转动惯量,同时增加弹性元件,提升机器人运动能力和安全性。
整机构型的研究应用
下面我们从运动关节、构建流程、减速器等几个方面,来看看仿人机器人的整机构型研究及应用。
· 整机构型和伺服驱动器的关系
整机构型和伺服驱动器之间有两种关系,一类是伺服驱动器作为独立模块,单独测试组装,再和整机结构连接;另一类则是伺服驱动器结构和整机融合在一起。优必选大型仿人服务机器人Walker目前用的就是第一种方案。

Walker可以实现开冰箱、递送物品等灵活服务动作
· 仿人机器人的运动关节特点
Walker作为“智能助手”,在一些特定场合,能够帮助或代替人类完成简单重复的服务。因此,在做机器人关节设计时,我们首先看看人类关节和肌肉是怎么工作的。
人的关节运动的特点之一,是运作速度快、机动性好,同时脚着力点是离散的、高速碰撞的。
如何满足这种关节运动特点?这就需要在关节设计的时候,实现瞬时高功率输出、高能量利用效率以及抗瞬时冲击能力。

Walker具备上楼梯的适应能力
因此,弹性驱动器的概念被提出,它的基础来源于Hill三元素力肌肉模型,主要由三部分组成:CE收缩单元、SE串联单元、PE并列单元,分别有两种组合形式:PS肌肉模型、SP肌肉模型。
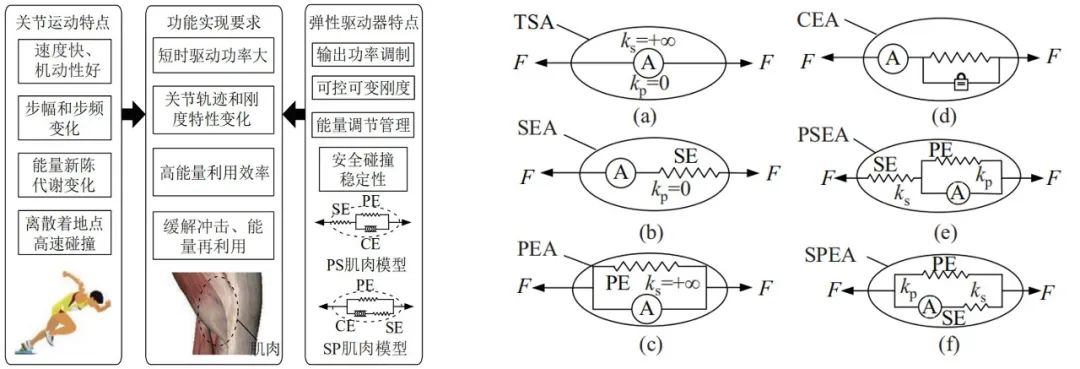
当两种模型转换成机器人应用的驱动器时,可以产生多种形式(上图右):
(a)是传统的刚性驱动器,可以理解为电机+减速器+编码器;(b)是传统的驱动器+弹性单元,然后连接负载,构成SEA串联驱动器;(c)是在传统的驱动器外并联一个弹性单元,就是PEA;(d)在SE的基础上增加离合器clutch,弹性单元可以被控制;(e)(f)则是以上三种的一个组合形式。
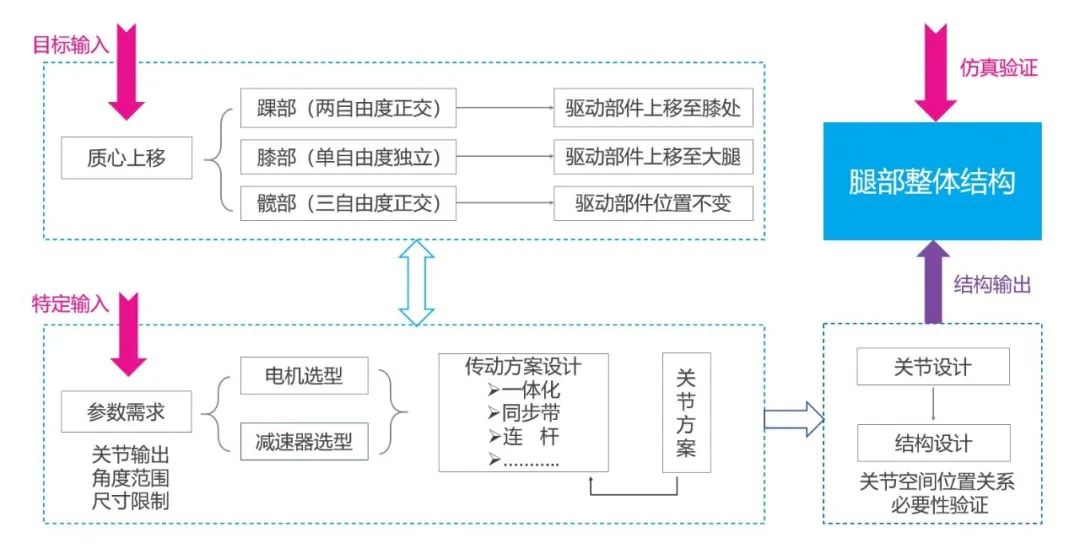
· 整机构型的构建流程
对于Walker整机构型的构建流程,首先定义每个关节的力矩需求、转角需求、尺寸规格等,再根据需求去选择电机、减速器、编码器等。
整个驱动器方案做好后,再设计仿人机器人的构型,把机器人整机三维模型放进仿真平台测试,经过几轮迭代,得到一个优化设计。
· 减速器标准化制定
提到减速器,不得不说由于仿人机器人运动特点,舵机主要工作在低速高扭矩场景,而具有高速度低扭矩特性的电机无法满足直接使用需求,只能通过减速器来降低速度和提高扭矩。
仿人机器人常用的减速器主要有三大类,由于机器人对于控制上精度要求较高,回差是机器人用精密减速器的关键性能指标之一。

目前,精密减速器标准有GB/T30819-2014《机器人用谐波减速器》和GB/T 35089-2018《机器人用精密齿轮传动装置实验方法》。然而,这两个标准对机器人精密减速器的回差都没有详细规定,回差又分为静态和动态,对应的测试方法不同,非常有必要建立一个国家级的标准。作为中国通用机械工业协会减变速机分会标准化委员会委员,优必选科技积极参与《精密减速器回差测试与评价》标准制定工作,统一减速器回差测量和评价方法,促进机器人关节控制工作研究发展。
整机构型的关键工具
仿真平台是整机构型的关键工具,对于任何机械设计工作的重要性不言而喻。
不同的整机构型,哪怕只有一点点差异,从外观上很难观察出来,都会对机器人造成很大的影响。有了仿真平台,就可以对机器人物理模型进行动作模拟,缩短研发周期,减少设计风险。

在仿真平台上,针对整机构型的优化,包括了设计变量、限制条件、目标函数三个部分。
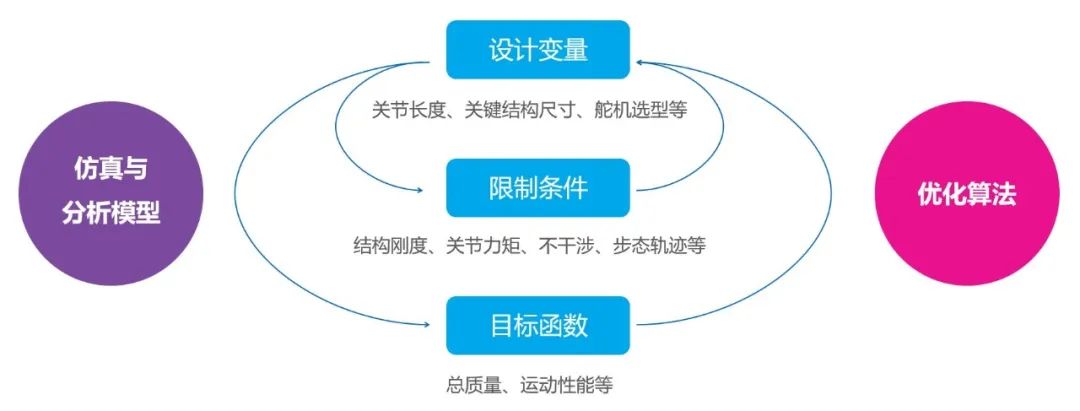
机器人机械系统优化
其中设计变量包括关节长度,比如机器人腿长,还有伺服驱动器选型,比如电机、减速器等不同组合;限制条件,包含了结构刚度及强度、关节力矩、步态轨迹;最终希望达到机器人总质量最轻、运动性能最好的优化目标。

快速行走仿真&实际效果对比
如上图所示,Walker除了手臂摆动不一致,腿部步态和运动算法都是一样的。同时,也会对仿真和真机的关节力矩曲线作比较,更好地指导实际的真机设计和测试。
未来发展趋势
在整机构型的未来发展趋势上,一是伺服驱动器和整机构型的融合设计,机电和运动控制方面的联合仿真,实现机器人的最优设计;
二是引入弹性元件,为电驱动伺服驱动器提供辅助力矩和缓冲地面冲击;
三是仿生学应用,我们知道,仿人机器人很多设计都是模拟人或动物背后的原理,这些动物和人体骨骼肌肉的研究将助推机器人机械技术的发展。

一起走进人机共存的时代
不难想象,仿人机器人的机械结构,在未来一定会得到快速发展和广泛应用。优必选科技将持续投入核心硬科技,让人类的生活方式变得更加便捷化、智能化、人性化。
相关资讯
更多- 专注细节 见证不同——中国力量闪耀LogiMAT 2026
- 一带一路 出海向新丨中叉网/AGV网2026亚欧大陆万里行在德国LogiMAT 2026正式启航
- 中国AGV网上周热点回顾(2026年3月16日-3月20日)
- 中国AGV网上周热点回顾(2026年3月9日-3月14日)
- "质量安全与机器人产业健康有序发展”系列活动暨首届机器人检验检测与标准认证研究大会在福州举行
- 中国AGV网上周热点回顾(2026年3月2日-3月7日)
- 杭叉集团|聚力而行,共赴山海——杭叉集团外销系统2025年度总结表彰暨业务研讨会圆满举行
- 立春序开,万象更新:工业车辆行业的“春之信”
- 中国AGV网上周热点回顾(2026年1月26日-1月31日)
- 杭叉海外|扬帆东南亚,奋进正当时:杭叉越南首届年会隆重召开