如何使用柯蒂斯1314刷入叉车AGV底层驱动
转载 2020-08-31 10:03 苏州睿斯博特 来源: 苏州睿斯博特
在我们实际改AGV叉车过程中,除了在硬件上对AGV叉车进行改动外,也需要将叉车的柯蒂斯驱动更改为CAN通信。

目前的常规叉车,除了林德和永恒力的部分车型外,基本上都可以用柯蒂斯驱动器进行替换。比如林德的T20,可以将ZAPI驱动器更换为柯蒂斯的1232E+1220C的配置,杭叉的绿色新能源车,一般标配是1298+1220E,可以将1220E更换为1220C,并且更换线束,则可以更改为CAN通信。
如果有需要更改的车型,可以联系敝司info@resbot.cn,我们提供专业的叉车改无人驾驶解决方案。
准备工作:
硬件:柯蒂斯1314和1309一套,笔记本电脑一台。
软件:柯蒂斯1314和1309驱动程序,已经柯蒂斯底层驱动程序(一般是.exe后缀)

目前主流的驱动器1232E、1220C、1253C和1298基本上程序口为Molex接口,在驱动线上有防错功能,所以不用担心插座。一般先对照电气原理找到对应的程序口,进行刷机操作。以下我们以常用的搬运车1232E+1220C和堆高车常用的1298+1220C为例做个说明。

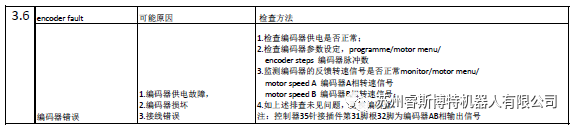
开机前,还请检查行走电机的UVW三根线是否连接正确,并且检查电机的编码器是否已经正确连接(可以参考《叉车编码器检测方法》一文),电机的刹车是否已经正确连接,温度传感器是否也已经正确连接。
检查一下1220C的M1和M2是否已经正确连接转向电机的B-和B+,转向编码器是否也已经正确连接。如果出现报错“motor polarity fault”,需要将M1、M2互换一下。
步骤一:烧入底层程序
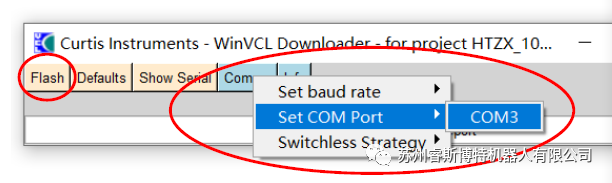
在PC端安装1314PC的驱动,驱动器上电后,插入设置口,进入烧入底层程序。
Comms -> Set COM Port -> 选择ComX(柯蒂斯1314对应的口) -> 单击“Flash“ 开始导入程序。
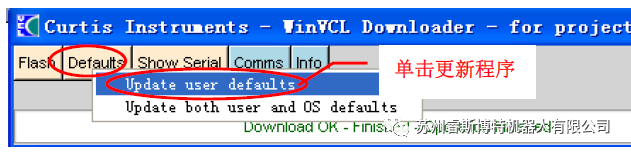
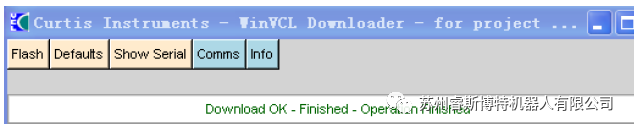
当弹出下图对话框时,程序导入完成。单击“Defaults”→“Update user defaults”更新程序。
等待时间结束(会显示Download OK) ->按下叉车急停拔出(重新启动电源)。
步骤二:导入1232E/1298参数
打开XXXX.CPF文件 ->点击View下面Save file to connected system->Yes->点击Advanced Cloning->Yes
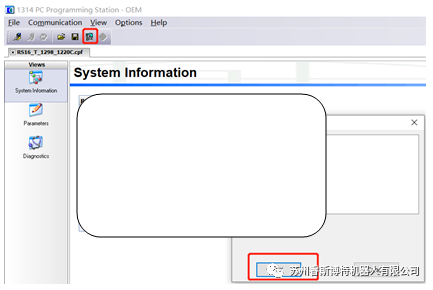
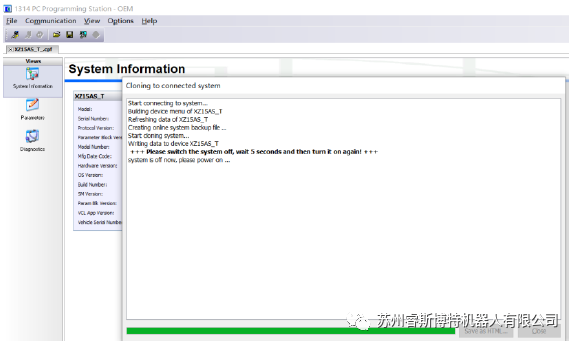
系统会提示“Please switch thesystem off, wait 5seconds and then turn it on again!” ,
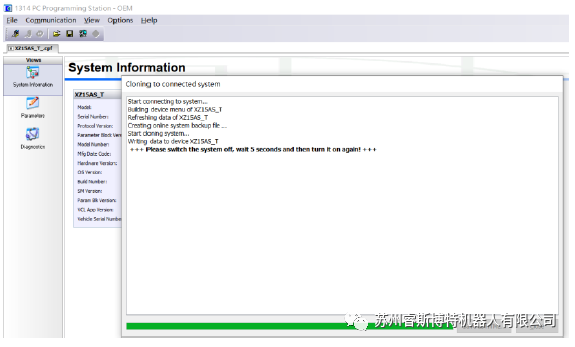
按照提示按下急停等待5s ->系统会提示“Please power on!”
->拔出急停->显示0 Errors /0Warnings,点击右下角“Close”关闭就可以了。

步骤三:导入1220C参数
打开1220C-2201_XXX.CPF->下面操作同1232E/1298类似。
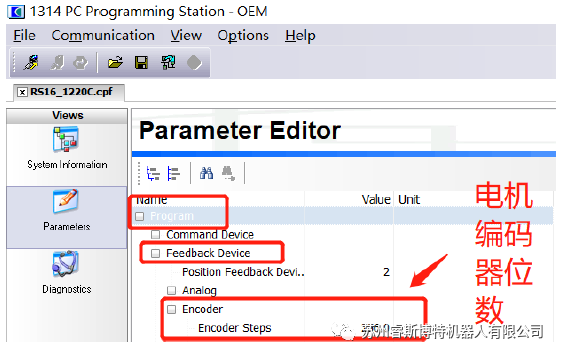
步骤四:电机编码调整
按照下图所示,调整电机编码器位数,编码器上有写明。或者按照改造前的叉车的1220E中的参数读出去也可以的。
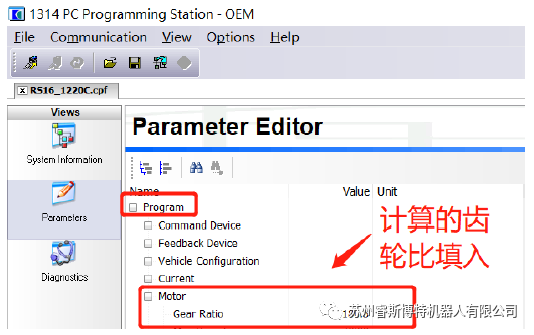
步骤五:电机齿轮比调整
驱动轮上的大齿轮数÷转向电机上的齿数×转向电机的齿轮比,将计算值填入图中,或者按照改造前的叉车的1220E中的参数读出去也可以的。
步骤六:排除报错
按下急停,拔出来,检查报错,并排除报错(根据手册)。再次上电,发现1220C已经驱动转向电机让舵轮在回中的现象。1232E/1298只有一个PLC PDO TimeOut。以下图为例
步骤七:行走电机匹配
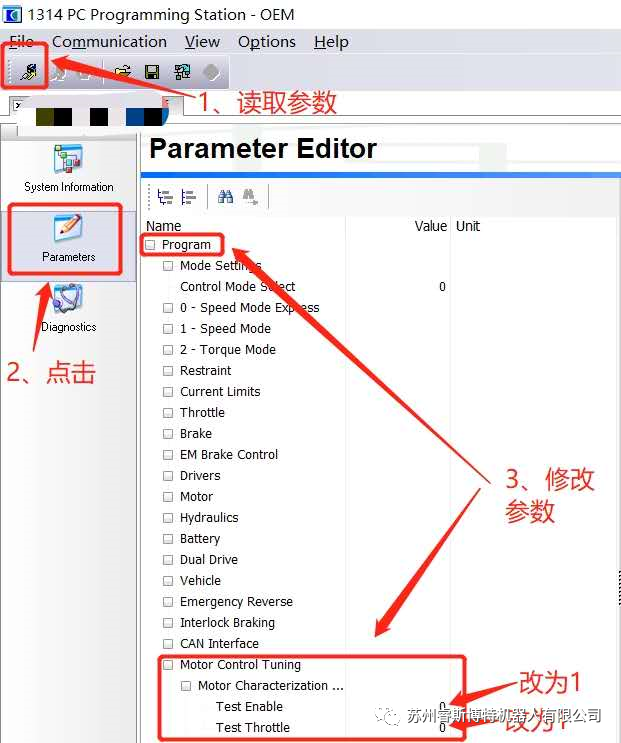
使用1314软件,点击Parameters。点击Motor Control Tuning->IM Motor Characterization Tests-> Enable调成1(会听到清脆的”卡擦”声音)-> Test Throttle调成1行走电机会开始匹配,从低速慢慢的变成高速。最后”咔擦”停止。重启急停即可。
步骤八:完成匹配,CAN发送报文测试
按照以上步骤,您就可以完成柯蒂斯底层程序的刷入和测试,可以开始用CAN卡来进行调试AGV叉车了。
相关资讯
更多- 美国空军基地部署电动移动电源站,叉车与剪叉作业走向“设备+储能”一体化
- 中国AGV网上周热点回顾(2026年6月15日-6月20日)
- 中国AGV网上周热点回顾(2026年6月8日-6月13日)
- AGILOX × 上交会 | 6.11-13
- 中国AGV网上周热点回顾(2026年6月1日-6月6日)
- “一带一路 出海向新丨中叉网/AGV网2026亚欧大陆万里行” 圆满收官
- 第三届中国工业车辆和移动机器人“金力奖”颁奖盛典圆满落幕
- 中国AGV网上周热点回顾(2026年5月25日-5月30日)
- 中叉网/AGV网网将再度亮相LET 2026,共筑智慧物流新未来
- 中国AGV网上周热点回顾(2026年5月18日-5月23日)