英伟达发布高性能 人工智能和传感器平台以加速自主移动机器人的开发
原创 2022-03-28 11:12 DDing 来源:中国AGV网

NVIDIA 宣布推出“Isaac Nova Orin”平台,以加速自主移动机器人(AMR:Autonomous Mobile Robots)的开发,该机器人 能够检测步数和不规则行为,并在自主来回和左右移动的同时自主移动到目的地。NVIDIA 推出 Isaac Nova Orin 以加速自主移动机器人的开发。
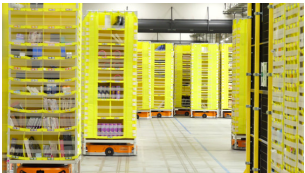
在某些情况下,使用 AMR 的仓库拥有 9 万平方米以上的场地面积,通过根据仓库面积增加或减少 ARM 的数量,也可以灵活地满足仓库侧的需求。之一。然而,在医院、零售商、机场、制造商等使用 AMR 时,不断移动的工人的存在是一个主要障碍。
为了加速此类 AMR 的开发,NVIDIA 发布了“Isaac Nova Orin”,这是一种最先进的计算和传感器参考平台。Isaac Nova Orin基于Jetson AGX Orin构建,可提供服务器级 AI 性能,将高性能 AI 计算能力与最先进的中心技术相结合。
Isaac Nova Orin 包含设计、构建和评测 AMR 自动驾驶所需的所有计算和传感器硬件,其核心是两个 Jetson AGX Orin 单元。两个 Jetson AGX Orin 可实现高达 550 TOPS 的 AI 计算。这些模块还可以实时处理来自一个传感器单元的数据,该传感器单元由6 个摄像头、3 个激光雷达和 8 个超声波传感器组成。
Isaac Nova Orin 不仅适用于这些 AI 计算硬件,还适用于NVIDIA Isaac ROS GEM和新的模拟应用程序等硬件加速包它还包括对NVIDIA Isaac Sim的支持。NVIDIA 强调,通过利用这些,AMR 可以更好地识别周围环境、安全避开障碍物并计算有效路线。
这是一个使用 NVIDIA Isaac Sim 构建的虚拟环境。“Isa ac Carter”被编写为在虚拟环境中自主运行的 AMR。

可以随机构建用于训练 AMR 自动驾驶的虚拟环境。



组成部分有仓库、货架、木箱、纸箱、托盘、叉车等。您可以自由放置货架和障碍物(托盘、纸板箱、叉车等)。


在虚拟环境中行驶的 AMR 使用 NVIDIA 的视觉算法SLAM来检测周围的物体。
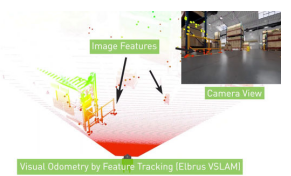
从那里,周围环境通过 3D 网格再现......

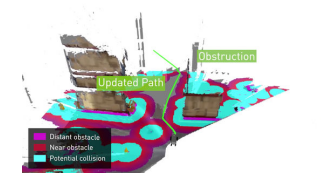
识别周围环境中的“远距离障碍物”、“近障碍物”和“潜在碰撞”,并去除与这些不对应的部分。通过这样的驾驶,它在虚拟空间中模拟驾驶,同时避开障碍物。
相关资讯
更多- 重磅!镭神智能斩获上海市科学技术奖一等奖,自研 1550nm 光纤探测激光雷达兼顾海上作业与反无人船双重应用
- 爱动超越赋能先进制造高质量发展,双案例入选2026全球数字经济大会AI典型案例,树立全国"AI+先进制造"标杆样本
- 风雨无阻 千里驰援丨三一服务从不缺席
- 你的物流差的不是自动化,是可扩展性
- 优必选与申昊科技签署战略合作协议,人形机器人加速落地电力行业优必选科技
- 邀请函 | 聚焦数智物流装备,迈睿机器人邀您共聚青岛APIE2026
- 通用“眼+脑”即将亮相2026越南工业科技展,梅卡曼德邀您共见精密智造新突破
- AI时代算力密度狂飙,电力底座如何“极限跨越”?
- 朗誉展讯|朗誉将亮相第 16 届新疆矿博会,无人重载运输车荣获官方优秀品牌认证!
- 展会邀约|2026世界人工智能大会