麻省理工学院 CSAIL 开发了可以感觉到抓取的机器人抓手
原创 2022-04-19 09:33 优优 来源:中国AGV网
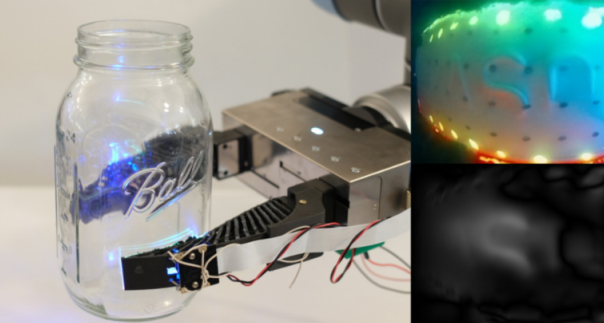
GelSight鳍状射线抓取器能够感受到梅森罐上的图案。|来源:CSAIL
麻省理工学院计算机科学与人工智能实验室(CSAIL)的一个研究小组开发了一个机器人抓手,其鳍状射线手指能够感受到它所操纵的物体。
CSAIL的感知科学小组在教授Edward Adelson和机械工程博士生Sandra Liu的领导下,为他们的抓手创建了触摸传感器,使其能够以与人类皮肤相同或更高的灵敏度进行感受。
该团队的抓手是由两个鳍状射线手指组成。这些手指的作用类似于鱼的尾巴,它们会向施加的力弯曲,而不是离开,并且是由一种柔性塑料材料3D打印而成。典型的鳍鱼抓手有贯穿内部的横梁,但CSAIL团队决定将内部挖空,以便为他们的感官组件腾出空间。
抓取器的内部由LED灯照明。在中空的夹持器的一端,有一个安装在半刚性背板上的摄像头。摄像头面对着一层由硅凝胶制成的垫子,称为GelSight。这层垫子被粘在一块薄薄的丙烯酸材料上,后者被连接到内腔的另一端。
抓取器被设计成无缝折叠在它所抓取的物体周围。相机确定硅胶和丙烯酸薄片在接触物体时的变形情况。从这些观察中,摄像机通过计算算法,可以计算出物体的一般形状,其表面的粗糙程度,其在空间中的方向,以及每个手指所施加的力和传给它的力。
使用这种方法,该抓手能够处理各种物体,包括一个迷你螺丝刀、一个塑料草莓、一个丙烯酸漆管、一个鲍尔梅森瓶和一个酒杯。
在握住这些物体时,夹持器能够检测到它们表面的细微细节。例如,在塑料草莓上,夹持器可以识别其表面的单个种子。手指还能感觉到梅森瓶上的字迹,这是基于视觉的机器人技术难以做到的,因为玻璃物体会折射光线。
此外,该机械手可以挤压一个油漆管,而不破坏容器和溢出其内容,并拿起和放下一个酒杯。该抓手可以感知玻璃杯的底部何时接触到桌面,结果10次中有7次都能正确放置。
该团队希望通过使手指更强壮来改进该传感器。通过移除横梁,该团队还移除了大部分的结构完整性,这意味着手指在抓取东西时有扭曲的倾向。CSAIL团队还想创造一个三指抓手,可以抓起水果和蔬菜并评估其成熟度。
该团队的工作在2022年IEEE第五届软体机器人国际会议上发表。
相关资讯
更多- 派宝机器人亮相 “一带一路” 国际产业合作论坛
- 零次方书写商业场景落地新篇章!入选2025“VENTURE50”并荣登福布斯榜单
- 越南基地二期投产,天能深化全球布局
- 喜报!诺力执行副总裁徐松屹荣获浙江省杰出职业经理人“金马奖”
- 智能监控 相信安全--威盛电子2025 AI 安全新品发布会 暨合作伙伴大会在上海举行
- 五载奋楫创佳绩 荣誉登高启新程——安徽叉车集团荣登多项荣誉榜单!
- 全球家用机器人“开创者”iRobot启动“预打包”破产重组 中国债权人接手
- 斑马“收缩”AMR业务
- Flexion获5000万美元A轮融资:用仿真与强化学习打造“类人机器人之脑”
- 灵心巧手Linkerbot再获A+轮融资:从“高自由度灵巧手”走向数据与强化学习的全栈能力