和利时电机低压伺服电动轮 | 赋能电力巡检机器人智能“巡检”
转载 2022-05-14 10:10 和利时电机 来源:和利时电机
导读
近年来,随着各行各业发展对于电力需求的不断攀升,加速了电力行业的智能化转型升级,其中在巡检方面的表现,便是应用了巡检机器人等智能化设备。
电力巡检机器人能够代替人工完成大部分自动化巡检工作,既具备了人工巡检的便捷性,同时也克服了很多人工巡检作业中的不足,可以24小时不间断地监测电力设备状态,从而保障变电站等重要电力设备、设施的安全稳定运行。
1、巡检机器人行进传动机构类型
行进传动机构是巡检机器人的重要组成部分,如何改进行进传动机构,让机器人更加安全有效的完成线上作业,是众多机器人厂商亟待解决的痛点问题。市场上的巡检机器人的行进传动结构主要有固定导轨式结构、车轮式结构、仿人类行进结构、履带式结构,但各结构差异较为明显,比如履带式结构可以在山地、川地等复杂地形施展功能,它的障碍通过性强、行进平稳,但技术难度较高,设计环节较为复杂,机动能力也有待增强。而车轮式结构以移动方便、定位准确、控制方便等优点,现已成为变电站巡检机器人的主流方式。2
2、如何实现机器人任意角度转向灵活?
一般轮式巡检机器人常见的有三轮、四轮两种结构形式。三轮式机器人结构简单,但稳定性低,常在低速状态下运行。四轮式机器人也有两轮转向两轮驱动、四轮转向四轮驱动等结构。总体来说,四轮式的结构复杂,但转向灵活,且在高速运行情况下具有良好的稳定性。
目前四轮式机器人大都采用两轮转向和两轮驱动的方式,但两轮转向、两轮驱动结构的最小转弯半径受到限制,且两个驱动轮在转弯时处于滑动状态,降低了机器人的稳定性,不能很好地在有限空间运动且能够实现任意角度运动功能。
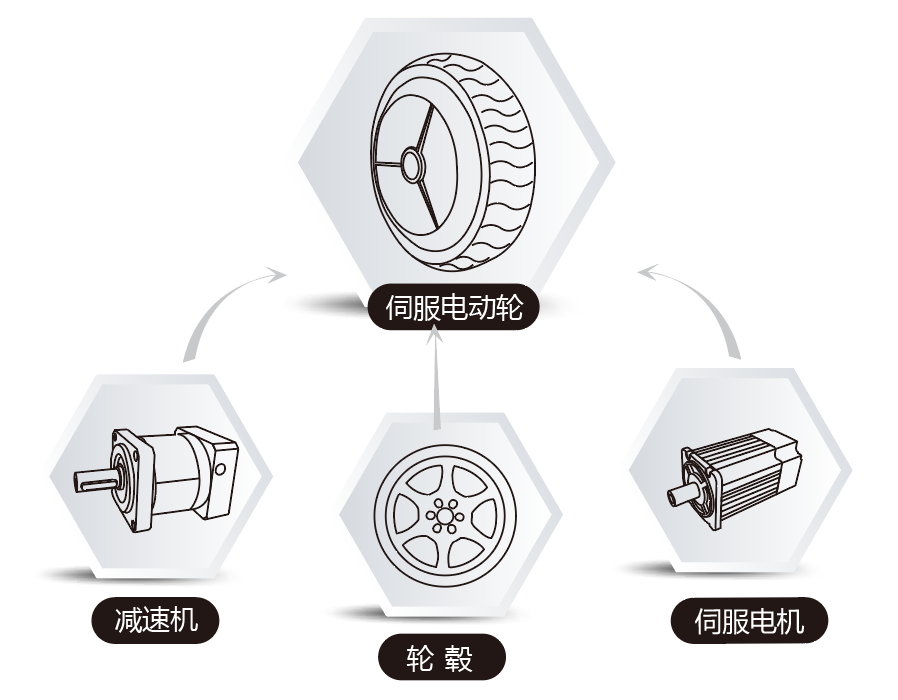
3、低压伺服电动轮设计的电力巡检机器人
和利时电机公司自主研发的低压伺服电动轮属直驱低压伺服轮毂电机,具备伺服电机高精度、高响应速度等优良特性,三位一体的极简化设计,直接替代原有电机+减速器+轮子的结构,大大提升了机器人底盘空间利用率,降低了机器人本体质量过大的缺陷。
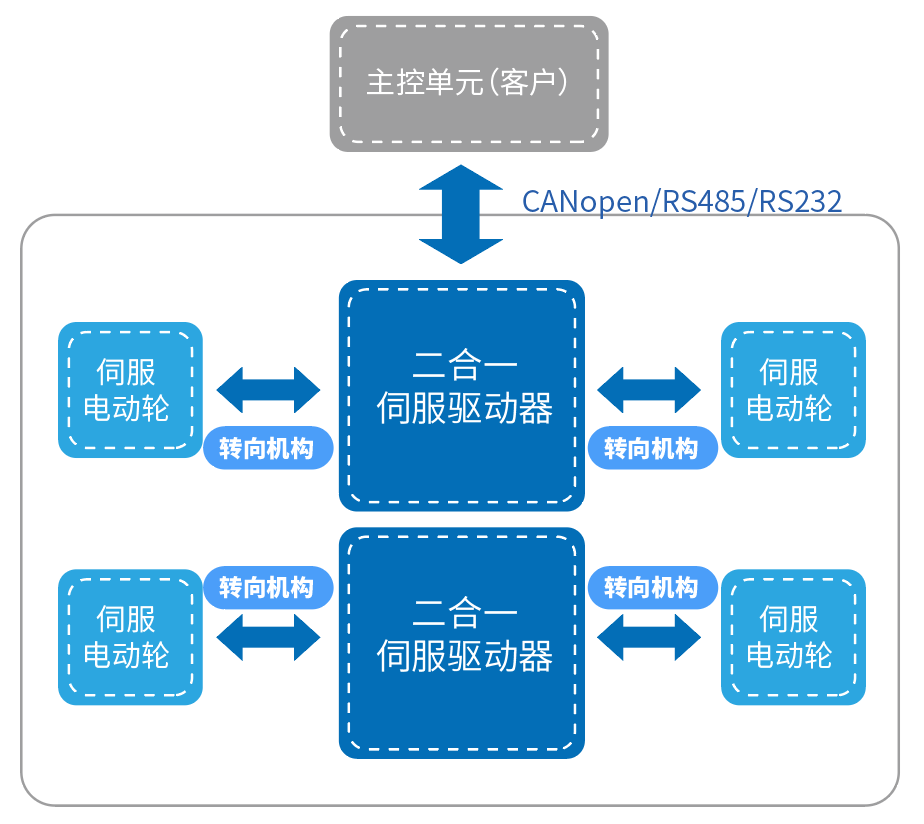
由于低压伺服电动轮具备单个车轮独立驱动的特性,因此无论是前驱、后驱还是四驱形式,它都可以比较轻松地实现。同时,低压伺服电动轮可以通过左右车轮的不同转速甚至反转实现类似履带式车辆的差动转向,大大减小机器人的转变半径,甚至可以实现原地转向。

4、在电力巡检机器人上的应用案例

(客户巡检机器人在零下14度雪地工作运行照片)
(和利时电机伺服电动轮方案:10530系列+DS20240C)
目前,和利时电机公司自主研发的低压伺服电动轮已广泛、成熟的应用在巡检机器人、清洁机器人、消毒机器人、酒店机器人、送餐机器人、AGV等对机器人底盘空间要求较高的场合。
相关资讯
更多- 全球顶尖专家团到访 YOGO,深度链接静安 “海聚英才” 平台,共探智能科技新未来
- 打通最后一公里!仙工智能携手张江租赁,具身智能叉车成首单交付标杆
- 天能氢电新品发布会定档!5月26日,辰星闪耀
- 诺力叉车・智搬未来|高铁加速度,湖人足球风 —— 品牌盛宴点亮杭州
- 工业车辆电控“大脑”登陆北交所 嘉晨智能开启国产替代新征程
- 林德物料搬运连续第三年荣获EcoVadis铂金奖
- 高光时刻 | 极智嘉五度斩获 RBR50 全球创新奖,具身智能迈向工业实战
- 全国首个!智元WITA(硅光动语)大模型完成备案,“部署态”征程再提速!
- 行深智能无人车高规格保障国家级外事接待!越共中央总书记现场点赞中国智造
- 重磅新品|劢微机器人推出全向托盘式无人叉车 OT10