案例 | 飞翼门无人装卸,劢微机器人助力日本食品饮料工厂打通智能搬运“最后100米”
转载 2024-04-18 09:33 劢微机器人 来源:劢微机器人

招工难、用工贵、安全风险、管理复杂、信息化程度低......提升物流效率,传统制造物流逐渐从传统作业模式转向智能无人化模式。

近日,劢微机器人飞翼门无人装卸车解决方案,成功上线日本大型食品饮料基地,打通搬运“最后100米”,构建全栈式智能物流。
飞翼门无人装卸车解决方案?
打通“搬运”隔阂,让智造工厂“活”起来
即刻出发,一探究竟!
该项目位于日本高知县,是一家大型食品饮料生产基地,通过导入“平衡重式无人叉车MW-SE15”为硬件载体的飞翼门无人装卸车解决方案,达到物资成品出库到装车的自动化全流程作业,同步实现信息数字化。
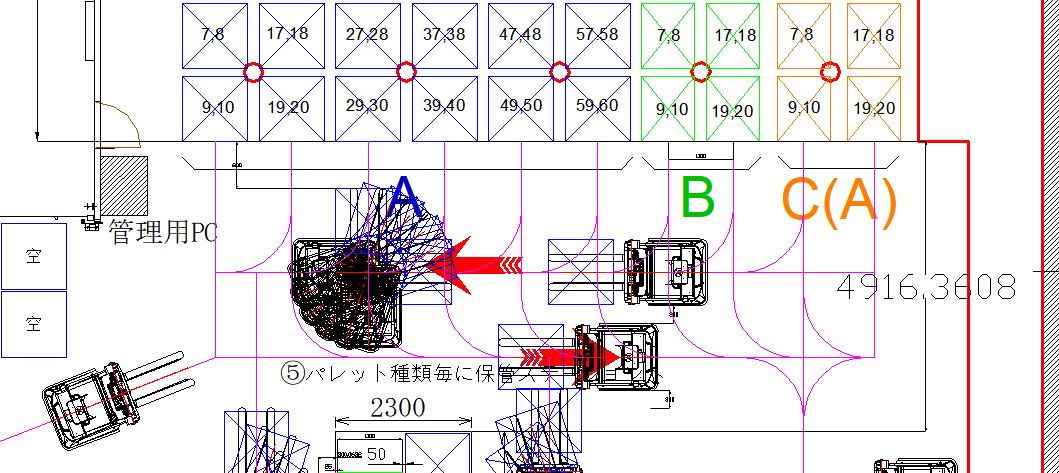
在近万平的后段工序中,分为梱包区域、成品暂存区、自动装车区三大区域,成品从输送线出料口,通过光电检测识别物料托盘种类,无人叉车自动运送至捆包区打包。完成打包,人工通过按钮盒呼叫无人叉车取料,将货物运送至成品暂存区分区堆叠存放。最后,通过导入天眼系统,检测库位状态(库位有无货物)及货物堆叠层数,反馈WMS,触发无人叉车进行自动装卸。

劢微机器人飞翼门无人装卸解决方案,通过搭载行业首创,视觉检测技术,确保装载货物零间隙,提升装车容量;且货车停靠,无需借助限位槽、限位杆限制停靠偏差,通过车载视觉及环境视觉实现车辆定位,库位自动规划,完成货物装卸,打通货物产线/仓库到货车的“最后100米”。

解决智能搬运割裂
打造最后的孤岛
1、人工操作,成本大,管理和维护难度大
2、装卸过程无法实时监控,缺乏规范化管理,且存在一定的安全隐患
3、人工搬运装卸,指挥调度凭经验,难以实时搬运任务、确认搬运位置
4、货物库存出入库盘点等靠人工或手工、耗时费力,易出错,工人劳动强度大,效率较低
5、人工搬运,作业效率数据无法准确计算,无法为管理提供有效决策依据

随着市场的推进,无人叉车场景的应用越发多元,从平面搬运,产线对接,到高位存取,再到无人装卸;场景应用朝着大型化、人机混合、多设备协同、按需作业等多元复杂场景;作为智能物流基础设施构建者,劢微机器人始终以场景实际需求出发,通过安全可靠的机器人产品及柔性化的解决方案帮助解决痛点问题,助力实现物流自动化、数字化转型升级。

劢微机器人全栈式智能物流解决方案,在食品饮料、汽车制造、机械加工、化工材料仓储冷链等诸多行业领域均有项目落地,深受众多客户认可。
目前,劢微机器人已实现20多个行业场景覆盖,助力400多家国内外企业智能物流升级。
相关资讯
更多- 华为云、Deepseek、Kimi、零次方等20家TOP模型企业齐聚,共创具身智能产业新范式
- 稳跑 2 年实测|牧星设备从容迎战 618 高强度订单峰值
- “上岗不摸鱼,搬运不打烊”—比亚迪平衡重式AGV实力尽显!
- 当公牛开始向细节要答案,一场无声的3C智造革命正在发生
- 破解无人车补能难题|爱普拉AGV无线充电机助力低速无人驾驶规模化落地
- 买叉车趁现在 | 618现已开启!硬核底价,全场直降
- 杭叉集团|深化“链主”牵引 共筑产业新生态——杭叉集团成功承办杭州市智能物流装备产业链对接活动
- OT10全球首秀|劢微机器人携智能物流机器人及数字孪生系统亮相LET 2026
- 海外展会 | 镭神智能诚邀您参加ILA Berlin 2026德国柏林航展
- 杭叉集团|杭叉集团与哈工鹏泽达成战略合作 拟共建智能清洁机器人合资公司