使用攻略丨走进AGV/AMR,零基础带你了解科尔摩根的NDC解决方案(一)
转载 2024-05-17 09:09 科尔摩根AGV 来源:科尔摩根AGV

AGV/AMR自动导引车
AGV(Automated Guided Vehicle)即自动导引车的缩写,它是一种在工厂中代替人工,并能按照一定的路径轨迹实现自动运送货物到指定位置的搬运设备。而AMR(Autonomous Mobile Robot),因其相比AGV而言拥有更强的自主性,也被称为自主移动机器人。它们的到来,给传统的物流搬运过程带来了全新改变,物流效率和安全性得到大幅提升的同时,也将柔性化贯穿其中,并能够行走于严苛恶劣的环境中。
如今,随着AGV/AMR技术的不断进步,它们被大量应用于工业制造、物流仓储、电商、医院以及停车等商业场景中,为企业方带来诸多受益。今天,科尔摩根将开启系列推文,从零基础带您认识这一自动化生产线的关键设备,以及科尔摩根的NDC解决方案是如何为AGV/AMR提供强大支持的。
车辆类型
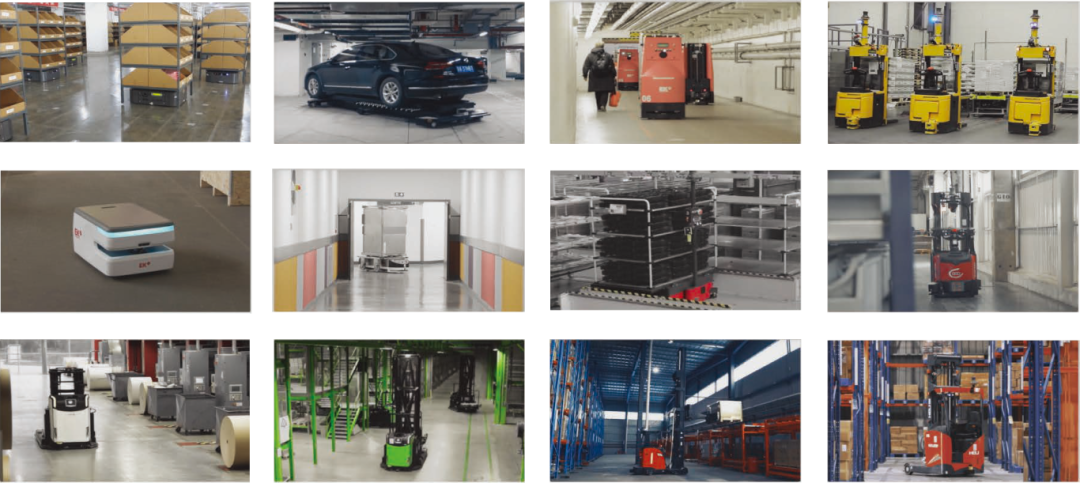
对于AGV/AMR而言,不同的车辆类型有着不同的性能特点,直接决定了其用途。按照搬运方式的不同,常见的车辆类型有:
01、叉车,高举升叉车
货叉式的AGV/AMR用于托盘类物料的搬运,可以实现机台到机台、机台到地面、地面到地面、以及叠放托盘等多种模式,用于解决不同高度、不同区域多站点间的物料运输。
02、拖车
通过尾部自动挂接和脱扣机构实现料车牵引。
03、移动机器人
也称为工业AMR,这种类型的车辆多采用小巧简约的车体设计,可以钻入物料车底部搬运物料。
04、背驮式升降台
采用多轮结构,可以进行更为灵活的移动,适合机台间各种形式物料的搬运。
导航方式
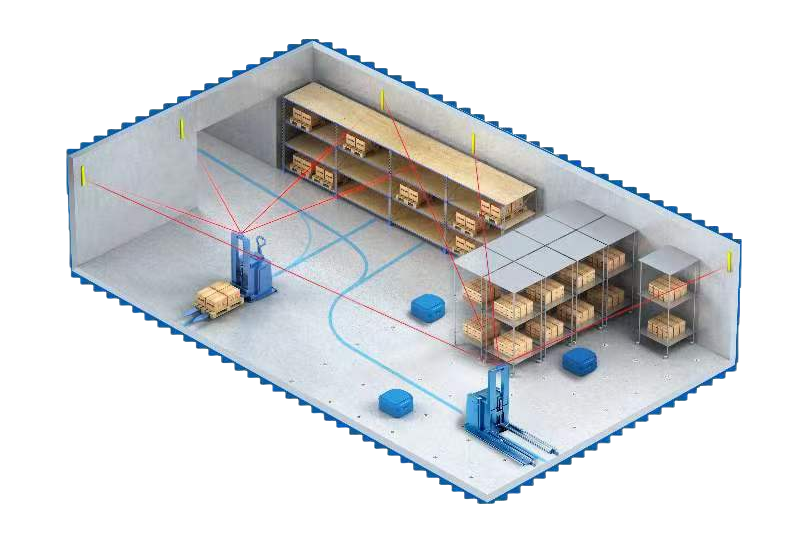
导航技术赋予了AGV/AMR的感知和行动能力,是其能够沿既定的导引路径行驶,并兼具安全性的关键。在NDC系统中,常用的导航方式有:
01、自然导航
利用激光扫描出工作区域的轮廓,通过识别周围物体,比如墙壁、立柱等轮廓来推算AGV/AMR本身的位置,从而实现导航。这种导航方式一般在工作环境变化率小的场景下使用。
02、反光板导航
通过激光扫描出工作区域中布置的反光板,来推断AGV/AMR自身位置实现导航。这种导航方式要求布置好的反光板位置不能变动。在行驶的路径上,要求AGV/AMR最少能扫描到两个安装夹角大于30°的反光板。
03、磁钉 磁带 磁感应线导航
在AGV/AMR行驶的路径上预先埋设好磁钉、磁带等,通过车载电磁传感器感应地上的电磁标记,来推断AGV/AMR自身位置实现导航。优点是原理简单,不受声光干扰,成本较低;缺点是需要定期维护,易受金属磁性物质的干扰。
04、二维码导航
通过扫描地面铺设的二维码标记,来推断AGV/AMR自身位置实现导航。
05、混合导航
除此之外,还可以将以上导航方式进行混合使用,以适应在复杂工作环境下的自主运行。
赋能AGV/AMR高效可靠运行
NDC解决方案是科尔摩根专为AGV/AMR倾力打造,已赋予数万辆AGV/AMR在精确导航控制下完成一系列作业任务。搭载NDC解决方案的AGV/AMR系统由三大部分组成:
调度系统
用于实现多辆AGV/AMR间的交通管制,根据AGV/AMR所在的位置以及目标站点位置,对AGV/AMR进行路径规划,并指导AGV/AMR按照规划路径执行。AGV/AMR的交通控制异常复杂,科尔摩根凭借智能算法,可以赋予AGV/AMR智能化。NDC的调度算法有两种可选,MAPP算法和SAPP算法:MAPP算法关注系统中全部车辆的路径规划,从而不依赖于人为干预的路径规划来处理交通死锁问题;SAPP算法专注于让每个AGV/AMR以最短的路径到达其目的地而不考虑其他车辆,需要人为定义交通规则来处理交通死锁问题。
车辆
通过将CVC700车辆控制器集成到AGV/AMR中,以此解锁目前所有主流导航方式,实现在–30℃至+55℃的温度区间内正常工作,并能承受振动、不稳定电源、温度变化、湿度和粉尘等恶劣环境。通过执行调度系统下发指令,控制AGV/AMR的动作执行。
工具
NDC8提供一系列的高效设计和服务工具,包括地图设计、车辆设计和系统设计,以及用于诊断的服务工具,充分赋能AGV/AMR企业需求。应用以上工具,可以帮助您高效地设计AGV/AMR,并且在AGV/AMR出现问题时快速准确地分析故障原因,从而排除问题。
本期内容是
对AGV/AMR系统进行的简单介绍
在下一期的推文中
将着重为您介绍
配套车辆软件工具
以帮助您对NDC解决方案有更好的了解
我们下期见!
相关资讯
更多- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT
- IMS Gear | 亿迈齿轮CMEF 2026邀请函
- 4月展会预告 | 安德普邀您相聚美国亚特兰大国际物流展览会(4.13- 4.16)& 德国汉诺威工业博览会(4.20-4.24)
- 浙报集团社长姜军一行调研蓝芯机器人:看3D视觉与AI大模型如何重塑智造
- 益佳品质 通行天下--中叉网专访益佳通新能源
- 邀请函 | 擎朗清洁爆品即将亮相荷兰Interclean清洁展!
- 能力升级 | 高密度存储玩家+1
- 未来工厂什么样?“电子电路展”与“先进制造论坛”,库卡给出答案!