低成本高效自主造叉车,核心组件怎么选?
转载 2024-08-01 08:45 仙工智能 来源:仙工智能
基于 SRC 控制器,仙工智能与合作伙伴联合提供的智能叉车标准产品包含搬运式、堆高式、平衡重式、单叉臂式四种类型,可以用于无人装卸、产线对接、库区转运、料笼堆叠、高位存取、多车调度等场景,覆盖汽车、3C 电子、机械重工、纺织、物流等主流行业。

当面对更多非标且复杂的需求时,仙工智能提供基于 SRC 控制器为核心的一站式造车解决方案,帮助集成商客户根据实际需求低成本、高效快速制造智能叉车。(关于「一站式造车之堆高式智能叉车」更多详情可以点击此处跳转查看)
本文将围绕核心控制及避障套件两大单元,为大家梳理叉车组件如何选型,让制造智能叉车没有门槛。

相较于顶升机器人,智能叉车的内部构造和末端应用场景均更加多样且复杂,因此智能叉车对控制系统的性能和稳定性等方面要求更高。
仙工智能有两款专用于制造智能叉车的控制器:智能叉车专用版控制器 SRC-2000-F(S) 和智能叉车安全型控制器 SRC-3000FS(叉车版),在专用性、高性能、稳定性、灵活性四方面表现出色,有效满足了智能叉车在复杂应用场景中的多样化需求。

量身打造叉车专用
集成各类叉车专用功能,精准匹配搬运式、堆高式、平衡重式、三向叉式等叉车高级需求。SRC-2000-F(S) 主要用于通用型叉车,SRC-3000FS(叉车版)用于安全型叉车。
算力升级性能强悍
RBK 软件架构升级,硬件异构加速,全面提升软硬件算力,提供双倍强悍算力,高性能计算能力、高并行性、低延迟,轻松应对复杂环境,支撑更强大的叉车业务场景。
智能定位导航控制
采用业内领先的 2D、3D 激光 SLAM 定位导航技术,可以实现 ±2mm 高精度的定位导航,多车精度保持超高一致性,确保叉车在复杂环境中依旧精准运行。
丰富接口二次开发
提供 TCP/IP、Modbus 等 API 接口以及脚本开发环境,根据特定需求自主二次开发,满足客户非标需求。

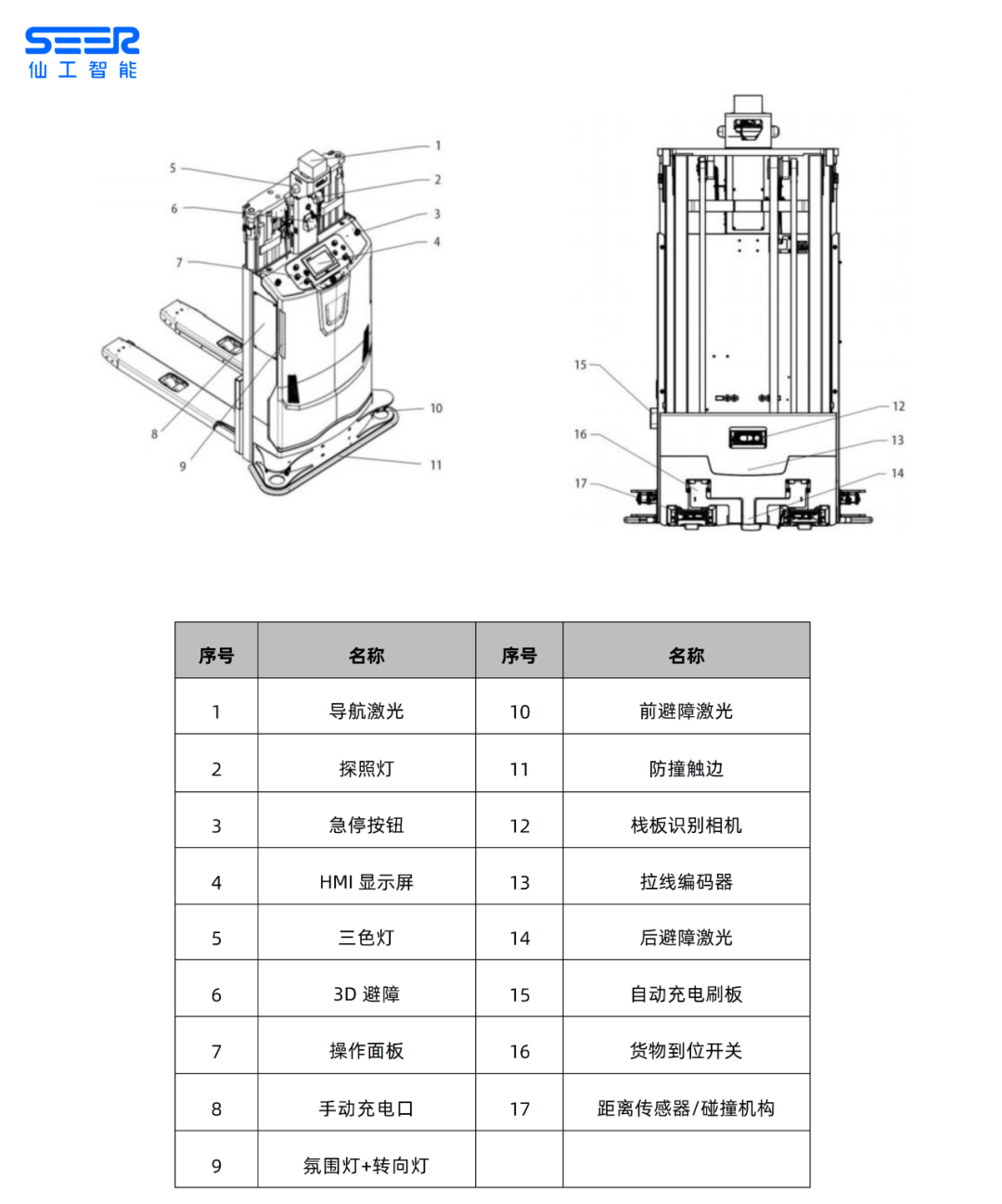
避障套件由避障激光和安全机械装置组成。激光传感器在不接触障碍物的情况下,检测到障碍物并避免碰撞,从而保证安全;安全机械装置则在接触障碍物后做出响应,以防止不安全因素的进一步加深。
2D 避障激光
能够提供高精度的二维障碍物检测,可以与导航激光共用,有效感知范围较大,但仅能检测单一平面上的障碍物,由于其成本相对较低,是许多室内应用的首选。
3D 避障激光
与 2D 激光相比,虽然成本较高,但其立体感知能力在复杂环境中具备更强优势,能够提供更为全面的立体式环境感知,同样可与导航激光共用,适用于室内外多种场景。
3D 避障相机
可与载具识别相机共用,支持集成搭载仙工智能 AI 自适应算法,能够实现对 3D 空间中物体的精确识别,尽管视野范围有限且成本较高,但其高精度和 AI 深度学习能力,可为叉车作业提供更强的业务支持。
距离传感器
体积小巧,能够精确检测叉车叉尖部分障碍物距离,但是存在较大盲区,通常检测范围在 0.15-0.8m;在相同空间内,其他传感器的光会形成较强干扰,同时也需要避免室外强光环境,因此主要用于叉尖等避障激光和相机无法有效覆盖的区域。
超声波传感器
能够检测到玻璃、透明薄膜等透明物体,但存在容易误触发的情况,且在多车环境中可能会受到干扰,主要适用于存在玻璃门或透明障碍物的场景。
接近/光电开关
具备更强稳定性,碰撞后能够快速响应,但仅在实际接触后才可检测到障碍物,主要用于叉尖碰撞检测区域。
防撞触边
机械式的障碍物检测装置,具备快速响应、高稳定性的特点,同样仅能在碰撞后检测到障碍物,且比较脆弱容易损坏,主要用于叉车前底部范围。
当前,仙工智能已实现全链路打通移动机器人产业链,成功与市面上 90%+ 主流传感器、驱动器等组件厂商完成适配,且持续新增适配清单,上述避障套件仙工智能组件库已实现全面覆盖,致力于为客户提供全面的造车支持。
相关资讯
更多- 华为云、Deepseek、Kimi、零次方等20家TOP模型企业齐聚,共创具身智能产业新范式
- 稳跑 2 年实测|牧星设备从容迎战 618 高强度订单峰值
- “上岗不摸鱼,搬运不打烊”—比亚迪平衡重式AGV实力尽显!
- 当公牛开始向细节要答案,一场无声的3C智造革命正在发生
- 破解无人车补能难题|爱普拉AGV无线充电机助力低速无人驾驶规模化落地
- 买叉车趁现在 | 618现已开启!硬核底价,全场直降
- 杭叉集团|深化“链主”牵引 共筑产业新生态——杭叉集团成功承办杭州市智能物流装备产业链对接活动
- OT10全球首秀|劢微机器人携智能物流机器人及数字孪生系统亮相LET 2026
- 海外展会 | 镭神智能诚邀您参加ILA Berlin 2026德国柏林航展
- 杭叉集团|杭叉集团与哈工鹏泽达成战略合作 拟共建智能清洁机器人合资公司