案例分享 | 3D视觉方案赋能人形机器人:精准抓取、智能导航与安全避障
转载 2024-10-17 09:26 迈尔微视MRDVS 来源:迈尔微视MRDVS

本期正文
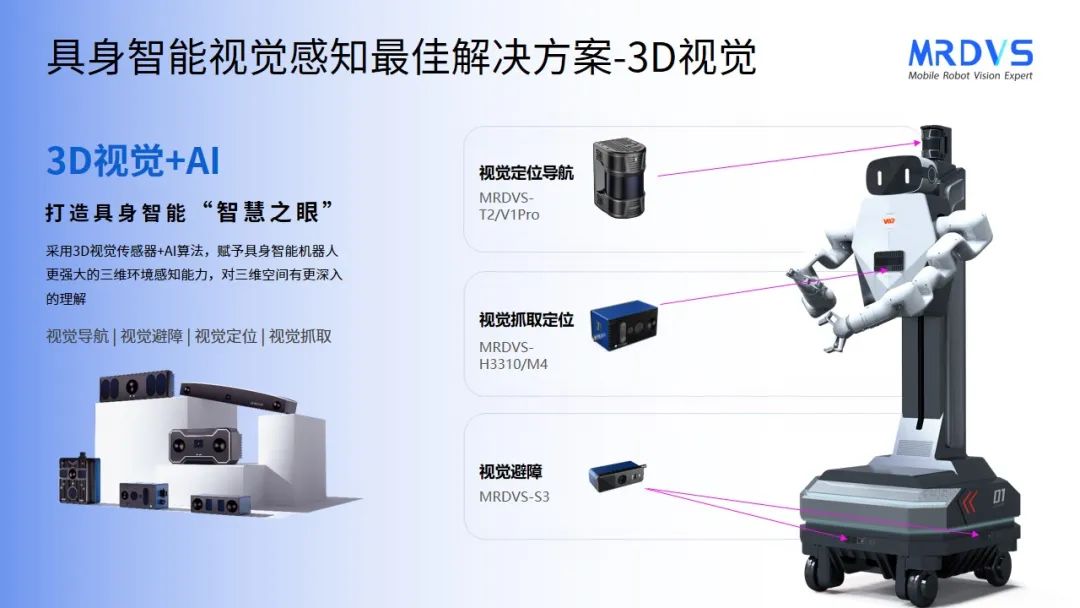
10月13日,杭州新闻联播播出#(向改革要动力)用自研打破垄断以数字赋能实体 积极探索新型工业化杭州方案# 专题栏目。其中,重点展示了迈尔微视联合威迈尔VMR打造的全球首款纯视觉类人形机器人——VersaBot(威宝)。该机器人是针对工业、物流及其他复杂场景的智能化需求设计的,结合了先进的3D视觉方案与灵活的运动控制系统,能够高效应对物料抓取、路径导航和实时避障等任务。
威宝人形机器人的成功推出离不开与迈尔微视的深度合作。基于迈尔微视的3D视觉技术,威宝机器人实现了高精度抓取、自主导航与智能避障等关键功能,使其能够在多场景中灵活作业,保障安全高效的任务执行。
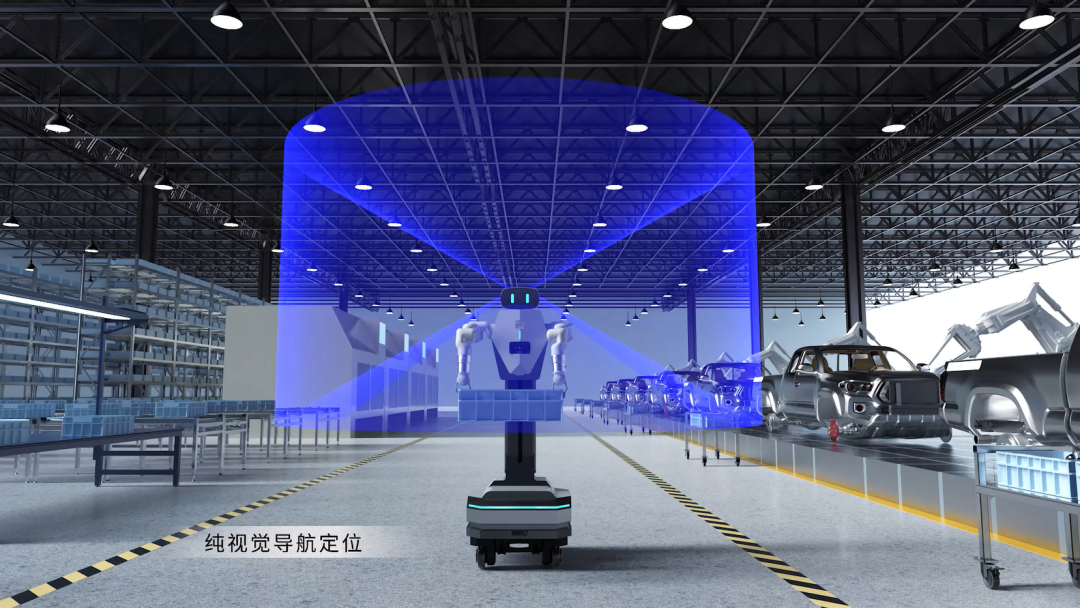
自主导航与路径规划:
视觉SLAM的深度支持
威宝人形机器人在路径规划和导航环节中,依托迈尔微视T系列视觉SLAM相机,确保其在复杂多变的环境中能够实现精确的自主导航。SLAM技术使机器人具备了同步定位与建图能力,即使在狭窄空间或动态区域,也能快速适应并完成任务。
视觉SLAM方案亮点:
• 实时定位与建图:通过高精度视觉数据,威宝机器人能够实时构建环境地图并规划路径。
• 30米感知范围:视觉SLAM方案支持30米的感知距离,为机器人在大型仓库和复杂车间中的远程导航提供有力保障。
• 灵活应对动态场景:即使在人员密集或设备复杂的环境中,也能快速响应,确保机器人路径规划的稳定性和灵活性。
智能避障方案:
保障机器人与人协作的安全性
在与工人和其他设备共享工作空间时,人形机器人威宝采用了基于S系列RGB-D视觉传感器的智能避障方案。该方案为机器人提供了全面的3D环境感知与语义识别能力,确保其能够智能决策并避开障碍物,保障协作作业的安全性。
智能避障方案亮点:
• 语义识别与智能规避:S系列视觉避障传感器结合语义识别算法,让机器人能够识别障碍物的类别和属性,并根据实际情况智能选择绕行或停障策略,有效规避风险,避免碰撞事故。
• 多模态感知能力:通过融合RGB和深度数据,机器人能够获得广角感知,即便在光照复杂的场景中也能精准判断周围环境。
• 抗干扰设计:智能避障方案确保机器人在多机协作环境中仍能稳定运行,避免信号干扰带来的感知失误。

精准抓取的保障:
H系列结构光相机提升物料处理能力
威宝人形机器人在物料抓取与操作方面,集成了迈尔微视H系列结构光相机,赋予其在复杂场景中的高精度操作能力。通过3D点云数据的支持,H系列相机让机器人即便面对不规则物体或堆叠物品,也能顺利完成抓取任务。
H系列结构光相机方案亮点:
• 亚毫米级精度:H系列相机支持亚毫米级的3D定位,确保每次抓取精准无误。
• 复杂物体识别:即使物体形态复杂,机器人也能准确判断物品的形状和姿态,提升抓取成功率。
• 抗光干扰:H系列相机在光照复杂的车间环境中依然能稳定工作,为高强度作业提供保障。

威宝人形机器人的成功推出,不仅展示了威迈尔与迈尔微视在机器人技术上的深度合作,也凸显了3D视觉方案在智能化升级中的关键作用。基于SLAM导航、智能避障和高精度抓取的多层次支持,威宝机器人展现了卓越的任务执行能力与环境适应性。
展望未来,威宝机器人将进一步拓展其应用领域,推动工业、医疗、教育和公共服务的智能化变革。迈尔微视与威迈尔VMR的不断创新也将为更多企业与社会提供更稳定、更安全、更智能的机器人解决方案,引领全面智能化的新时代。