技术前瞻 | 科聪引领料堆识别技术新高度
转载 2024-10-30 10:27 浙江科聪 来源: 浙江科聪

在矿业、建筑和农业等行业中,装载机作为重型设备的核心,其作业效率和安全性直接影响到生产进度和工人安全。然而,传统的装载机操作依赖人工判断,不仅效率低下,而且存在诸多安全隐患。为了解决这些问题,科聪开发了一种基于传感器融合技术的料堆识别技术,并成功克服了传感器数据干扰抑制、多源数据融合精确度提升、车载坐标系统误差最小化以及实时动态环境适应性调整等一系列技术挑战。
料堆识别
SOLUTION
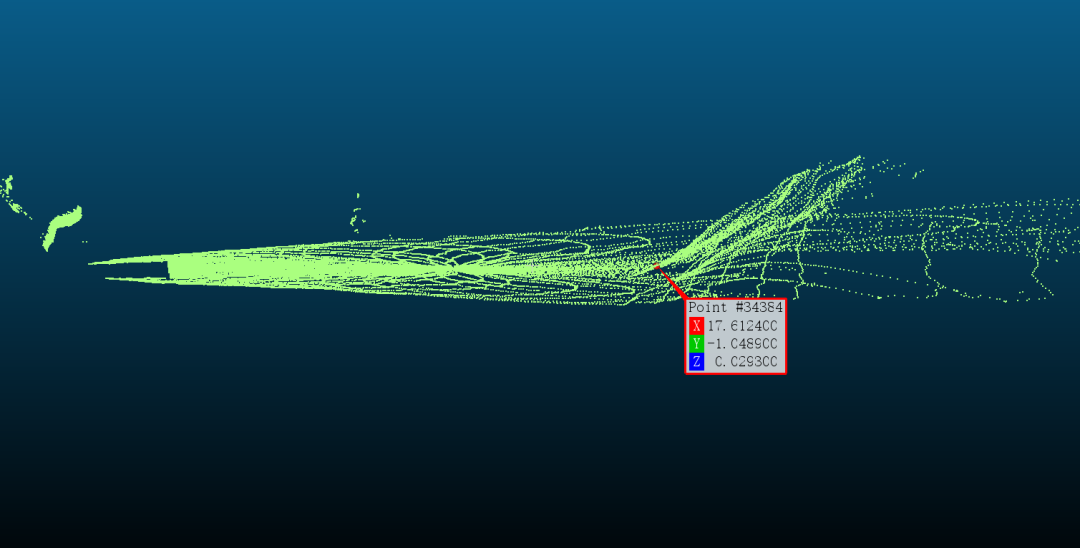
高精度深度点云数据的获取与处理
获取高精度的深度点云数据是实现准确料堆识别的基础。然而,传感器在复杂环境中容易受到干扰的影响,导致数据不准确。为此,科聪采用多传感器融合技术,结合激光雷达、深度相机等多种传感器的数据,提高了点云数据的精度和鲁棒性。同时,通过直通滤波和法向量过滤等算法,有效去除地面点和其他干扰数据,确保只保留有效的料堆点。
车载坐标系下的数据转换与标定
将基于传感器的点云数据准确转换为基于车载坐标系的数据,需要精确的标定和复杂的数学变换。科聪使用鲁棒优化匹配算法,通过激光与地图的匹配,确保深度相机或3D激光雷达的位置和姿态准确无误。此外,采用高效的三维坐标转换算法,确保数据转换过程中的误差最小化。
料堆特征提取与智能决策
从大量的点云数据中准确提取料堆的特征(如形状参数),系统能够判断装载机应进入哪种作业模式。采用前沿特征提出算法进行平面拟合,从点云数据中提取出料堆的坡度和高度特征,根据提取的特征自动判断装载机应进入整理模式还是铲装模式。
实时导航坐标计算与环境适应性
实时计算装载机的整理点和铲装点的导航坐标,要求系统具备高实时性和准确性。我们设计了高效的计算框架,优化了数据处理流程,确保在有限的时间内完成复杂的计算任务。同时,系统能够根据实时环境变化动态调整导航坐标,确保装载机的作业路径最优。
不同作业环境下(如矿山、拌合站、工程建设等),料堆的形状、大小和分布各不相同,系统需要具备良好的环境适应性和可靠性。科聪开发了自适应算法,能够根据不同的作业环境和需求进行调整,确保系统在各种环境下都能稳定运行。此外,在关键部件上采用冗余设计,提高系统的可靠性和容错能力。

科聪多年来深耕于移动机器人导航控制系统研发,致力于为移动机器人运动控制提供创新解决方案。针对不同行业的特定算法需求,不断进行创新开发和应用实践,为低速无人驾驶车辆的导航决策、功能拓展提供了精确且可靠的技术支持。科聪持续为行业提供先进的产品服务和技术,助力客户在移动机器人领域实现突破和发展。
关于浙江科聪
科聪是移动机器人控制系统行业领军者,同时也是国产标准化移动机器人控制系统先驱者,总部位于浙江杭州。科聪在移动机器人精准定位、动态路径规划、精确轨迹导航、多驱运动控制、自主可编程开发等方面处于全球领先水平,为千行百业提供可靠、稳定、灵活、易用的技术、产品、服务和整体解决方案。
科聪专注于移动机器人控制产品,在中国深受信赖,更跨越国界,服务于世界各地的客户,业务覆盖亚洲、欧洲和美洲,在全球有超过1500家合作客户。
科聪赋能仓储物流、汽车、3C、电子、通讯、能源、航空、航天、交通、医药、仪器仪表、食品饮料、化工、农业、环境、安防、教育等行业客户,引领移动机器人的未来,构筑智能世界。
相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT