使用攻略丨如何快速进行特定轮系结构车型的仿真测试?CVC700轻松帮您搞定!
转载 2024-12-27 10:12 科尔摩根AMS 来源:科尔摩根AMS

作为AGV车辆的专用控制器
CVC700以强大的功能和高精度的控制
为各行各业的物流运输提供强力支持
其中,通过它的仿真功能

可以让您毋需AGV车辆实体
轻松完成设计验证工作
本文将为大家介绍一种典型应用
有很多小伙伴问到,NDC是否能支持某种轮系结构的车型?
在我们的官方资料库*中,收录了近30种轮系配置(详见阅读原文),但我们能够做到的还远不止于此。如果您暂时没有账号无法登陆我们的官方资料库,或者您的车型暂时不在我们的资料库中,可以通过CVC700的仿真功能,亲自验证是否可行。
* 官方资料库仅针对科尔摩根合作伙伴开放,需具备账号才能登录
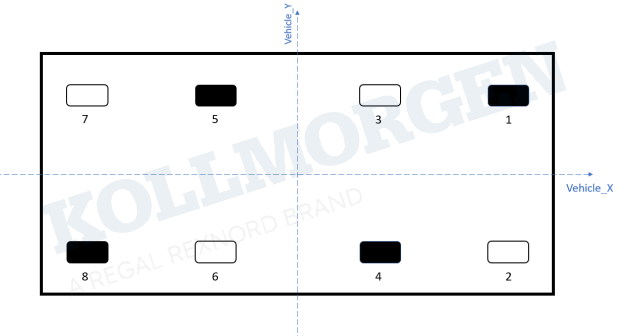
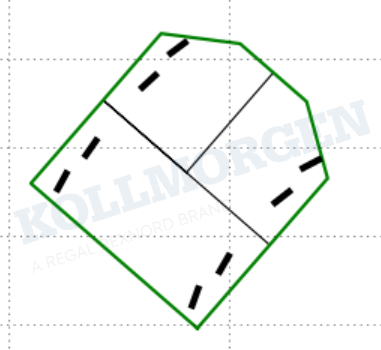
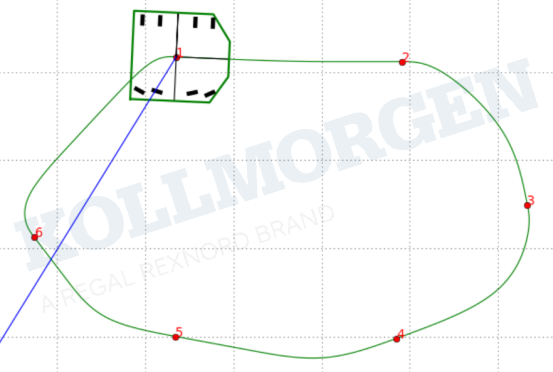
例如,图示为一个8轮重载全向车型,其中1/4/5/8为转向+行走轮,2/3/6/7为转向轮。
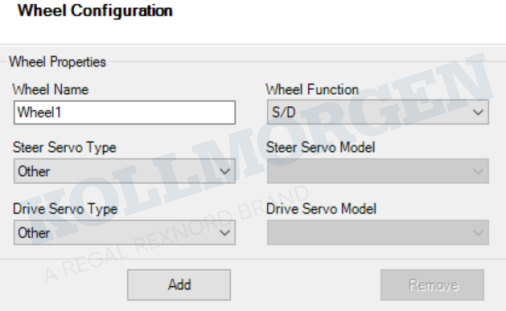
1、打开CVC700的配置软件Vehicle Application Designer,新建一个项目,选择QUAD Multiwheel结构,在轮系配置页面,进行如下操作:
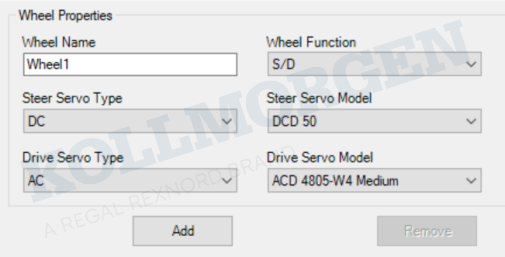
如果应用的是AGV车辆实体,那么这里就要指定转向和行走的驱动器,比如NDC即将发布的通用型GEN7。而现在我们只需要进行仿真,因此可以忽略驱动部分。
此处需要注意!添加舵轮的顺序,前两个轮子必须是相距最远的,比如1和8。

其余6个轮子,则无先后顺序之分。

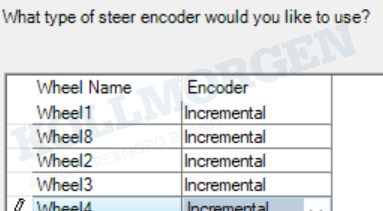
在编码器配置界面,因为仿真并不需要真实的数据反馈,所以选择增量型编码器即可。
2、接下来,便是在VAD的Physical view界面中,对每个轮子进行配置。设置正确的坐标,给定/反馈全部使用内部变量。
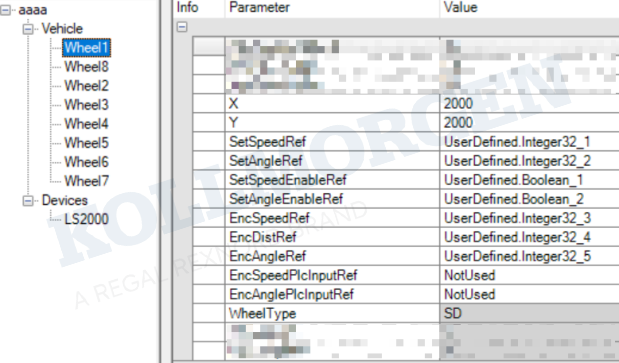
注意!因为索引使用的是内部变量,所以CVC700在计算其数学模型时,就需要一个kick off信号。在实体车上,它通常来自于CAN节点子设备。进行仿真时,您可以在PLC中写一段toggle程序,也可以更简单地——使用SDIO中的数据,因为SDIO本身就是内嵌在CVC700中的CANOpen IO设备。
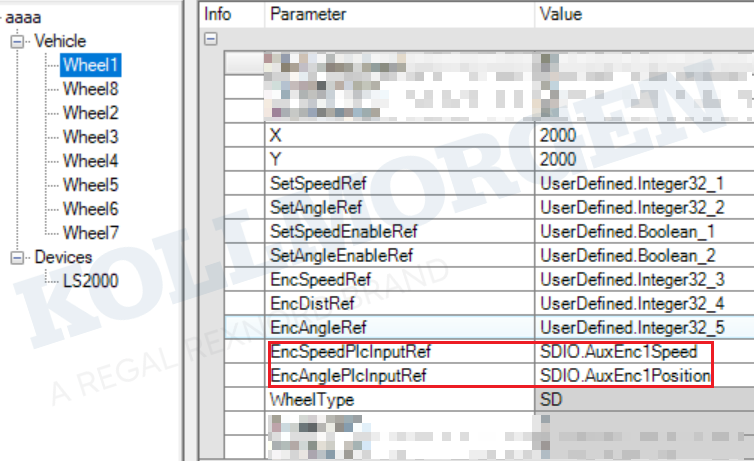
在SDIO的属性配置中,首先将调节器1设置为位置调节器,再任意设置SDIO.AuxEnc1Scale为1000。

然后,将1/4/5/8(转向+行走)轮的EncSpeedPlcInputRef设置为SDIO.AuxEnc1Speed,将所有轮的转向EncAnglePlcInputRef设置为SDIO.AuxEnc1Position。
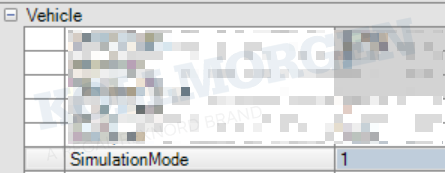
3、至此,我们便完成了8舵轮轮系的全部配置工作。此时,您只需要将参数Vehicle.SimulationMode设置为1,再下载到CVC700控制器,即可验证这台8舵轮车的运行性能。
打开NDC的调试工具Vehicle Diagnostic Tool,即可看到该车的模型。
使用手操器MCD8驱动这台车,就可以看到车辆手动运行时的姿态和轨迹。若暂无MCD8可用,也可以直接在仿真模式下,让车辆自动运行。
在VAD的导航初始化界面,直接设定位置为点坐标。在VDT中即可观测到,车辆“跳”到了该点。
而当设置为自动模式,便可以创建本地任务,让车辆自动运行。
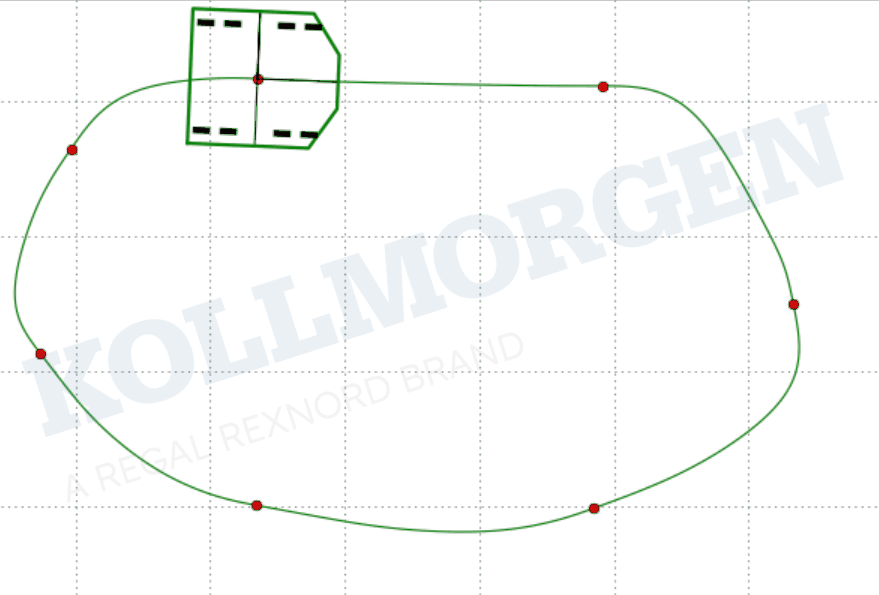
通过这种方式,您可以验证这台8舵轮车在各种转弯、旋转、平移等路径上的性能表现,也可以让车辆连接到NDC的调度软件System Manager上,从Host下发订单,让该车去执行任务。
以上所有这些工作
只需要一个CVC700控制器和一台电脑
坐在办公室里
便可运筹帷幄,决胜千里
何乐而不为?
关于科尔摩根-自主移动解决方案
拥有五十余载历史的Kollmorgen – Autonomous Mobile Solutions,即科尔摩根-自主移动解决方案(科尔摩根AMS),通过对自动导引车辆(AGV)和移动机器人(AMR)制造商等合作伙伴的赋能,在各应用领域部署了数万辆先进的 AGV 和 AMR 车辆。
科尔摩根AMS的NDC解决方案是由车辆自动化组件、系统软件和设计与扫描工具组成。NDC 8平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。
科尔摩根AMS的核心价值在于助力合作伙伴实现多项目标,包括同系统调度多种车型;具有较高的系统稳定性和强大的项目交付能力;可降低从前期项目实施到后期系统运维各方的实际总成本。
相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT