一文了解欧米麦克3D SLAM激光导航技术(一)
转载 2025-07-28 12:02 欧米麦克 来源:欧米麦克
在智能制造浪潮下,传统物流领域正迎来智能化变革,南京欧米麦克(OMARK,寓意 “0 MARK”,即无需任何辅助标记)在这一进程中崭露头角。其将 3D SLAM 激光导航技术成功应用于 AGV 领域并实现规模化量产,突破了高精度环境感知与自主决策的技术瓶颈,为仓储物流智能化树立了新标杆。
该技术以 3D 激光雷达为核心装备,其发射 905nm/1550nm 波长激光束,基于 ToF 原理实时构建三维点云地图,精度达 ±10MM。相比传统 2D 激光雷达,优势显著:支持 16 线 / 32 线 / 64 线等多线束扫描,垂直视场角 30°,能精准识别 5cm 低矮障碍物;10-20Hz 的高帧率数据处理能力结合 SLAM 算法,可在动态环境实时定位建图;抗干扰性强,能适应粉尘、弱光等工业场景。
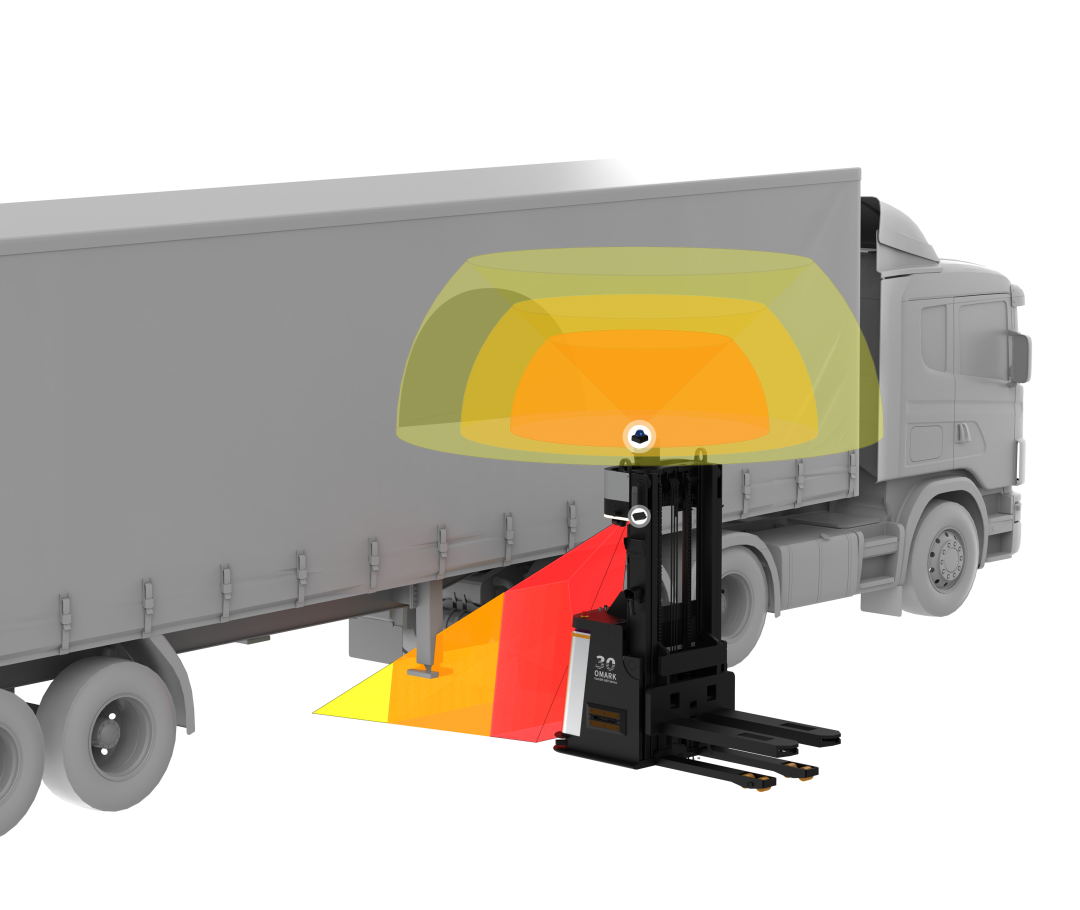
更值得一提的是,它采用无反激光 3D SLAM 自然导航,无需反光柱、二维码、磁条等任何辅助标记,可快速建立超 2 公里范围的全场景 3D 地图,场景所有特征均能呈现,实现完全自然导航。这一特性让其不受场景限制,环境适应性极强,能在室内/外场景中7*24 小时全天候运行,且部署快速,售后近乎零成本。
在与其他导航技术的对比中,3D SLAM 方案优势突出。感知层面,搭载 3D 激光雷达和更高算力控制器,机器人可采集充足环境特征完成 3D 建图与定位,无需改造空间环境,部署效率大幅提升。场景适应能力上,在室内高层货架、室外等复杂环境及面对动态物体时,表现都更为出色。同时,它不受环境光条件限制,昏暗室内或强光室外场景都能正常导航避障,且探测盲区小,最小探测距离低至10厘米,实现无盲区覆盖。
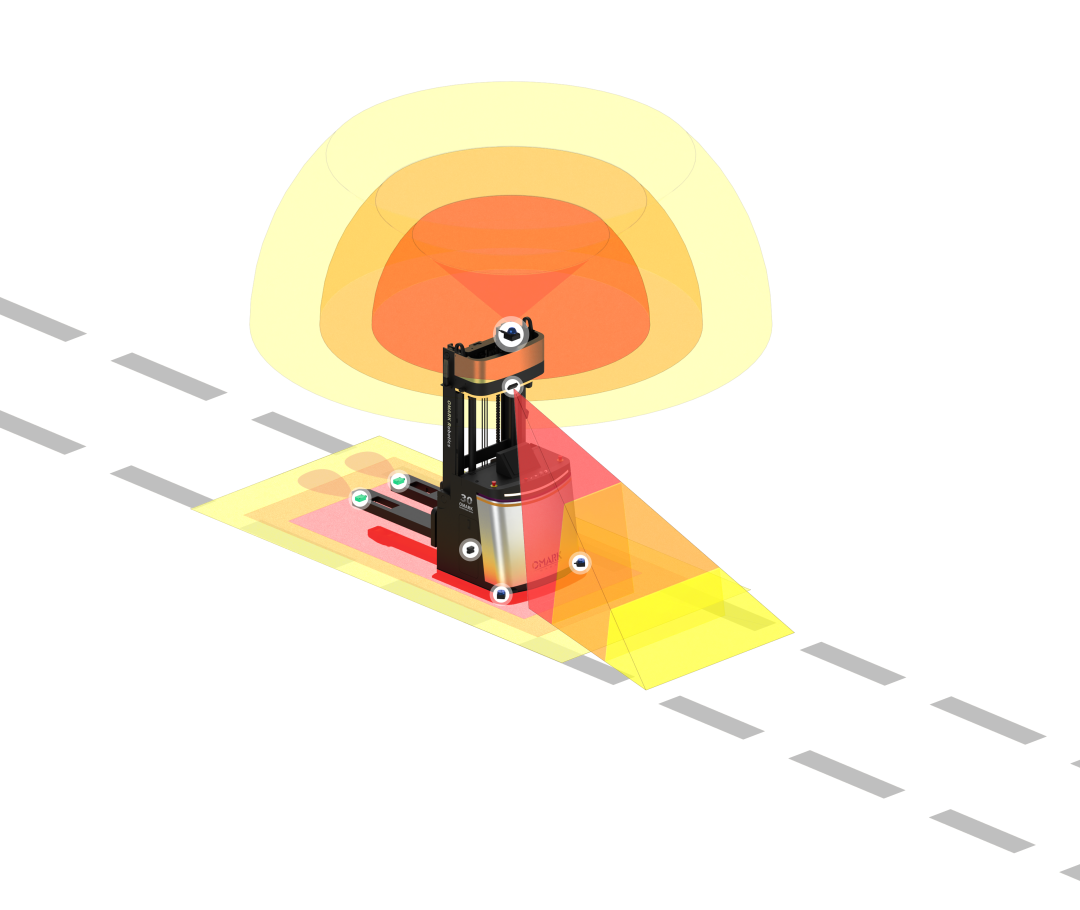
多传感器融合是该技术高效运行的重要保障。南京欧米麦克采用异构传感器融合架构:
3D 激光 SLAM 提供全局定位与动态避障,还通过改进算法优化路径规划;
末端视觉定位,借助模板匹配与亚像素边缘检测,实现托盘叉孔定位精度 ±5mm;
IMU + 轮速计则在激光雷达短暂失效时,通过航位推算保障系统鲁棒性。多传感器融合的导航及定位算法,加上全系统伺服控制,实现了毫米级重复定位精度。
经实测,某钢帘线行业场景,18000+库位,全场景无任何辅助标识,7X24小时无间断作业,日进出库位1000+次。
南京欧米麦克凭借 3D 激光雷达核心技术、多传感器融合及工程化创新,为客户提供“高精度、高柔性、高可靠” 的无人搬运解决方案,持续推动仓储物流行业智能化升级。