小白也能懂:用Eigen搞定机械臂数值法逆解
转载 2025-09-09 10:41 Agilex 来源:Agilex
在前几期中,我们实现了PIPER机械臂的点位控制、轨迹录制、视觉识别、陀螺仪控制及手势识别。正向与逆向运动学,是连接“空间指令”与“关节动作”的桥梁。无论是点击屏幕、挥手控制,还是自动抓取,背后都离不开今天实现的这套FK/IK求解。
更重要的是——所有代码已开源,欢迎动手实践!
开源链接:https://github.com/agilexrobotics/Agilex-College.git
摘要本章实现基于线性代数库Eigen实现松灵PIPER机械臂的正解,逆解的雅各比方法,自定义交互式标记interactive_marker_utils的实现
标签运动学正解、运动学逆解的雅各比方法、RVIZ仿真、机械臂DH、交互式标记、松灵PIPER
功能演示已关注 关注 重播 分享 赞 关闭观看更多更多退出全屏切换到竖屏全屏退出全屏AGV网已关注分享视频,时长00:48
0/0
00:00/00:48切换到横屏模式继续播放进度条,百分之0播放00:00/00:4800:48全屏倍速播放中 0.5倍 0.75倍 1.0倍 1.5倍 2.0倍 超清 流畅
您的浏览器不支持 video 标签继续观看
小白也能懂:用Eigen搞定机械臂数值法逆解
观看更多转载,小白也能懂:用Eigen搞定机械臂数值法逆解AGV网已关注分享点赞在看已同步到看一看写下你的评论
视频详情
已关注 关注 重播 分享 赞 关闭观看更多更多退出全屏切换到竖屏全屏退出全屏AGV网已关注分享视频,时长00:18
0/0
00:00/00:18切换到横屏模式继续播放进度条,百分之0播放00:00/00:1800:18全屏倍速播放中 0.5倍 0.75倍 1.0倍 1.5倍 2.0倍 超清 流畅
您的浏览器不支持 video 标签继续观看
小白也能懂:用Eigen搞定机械臂数值法逆解
观看更多转载,小白也能懂:用Eigen搞定机械臂数值法逆解AGV网已关注分享点赞在看已同步到看一看写下你的评论
视频详情
1.使用前准备1.1.硬件准备• AgileX robotics Piper机械臂
1.2.软件环境配置1. PIPER机械臂驱动部署请参考:https://github.com/agilexrobotics/piper_sdk/blob/1_0_0_beta/README(ZH).MD
2. PIPER机械臂ROS控制节点部署参考:https://github.com/agilexrobotics/piper_ros/blob/noetic/README.MD
3. 安装Eigen线性代数库
sudo apt install libeigen3-dev1.3.准备松灵PIPER的DH参数表以及关节限位查阅松灵PIPER用户手册可以找到PIPER的改进DH参数表与关节限位:

DH
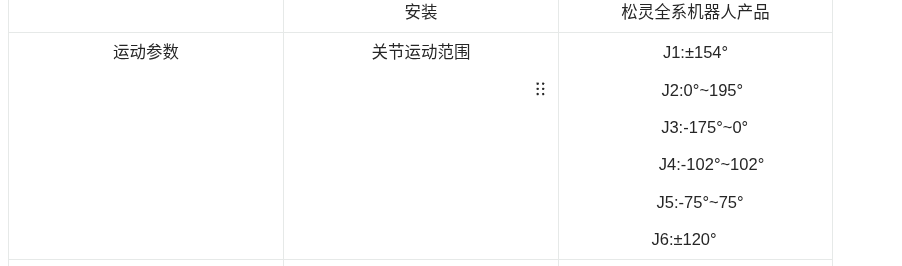
机械臂关节运动范围
2.正向运动学计算FK正向运动学FK的计算过程实际上是从每个关节的角度值----计算---->>机械臂某一关节在三维世界的位姿,本文以机械臂最后一个旋转关节joint6为例
2.1.准备DH参数1. 根据PIPER的DH参数表构建正向运动学计算程序,由1.3小结的松灵PIPER的改进DH参数表,可以得到

转换为标准DH,可以参考以下的转换规则:
标准DH到改进DH
αᵢ₋₁(标准) = αᵢ(改进)
aᵢ₋₁(标准) = aᵢ(改进)
dᵢ(标准) = dᵢ(改进)
θᵢ(标准) = θᵢ(改进)
改进DH到标准DH
αᵢ(标准) = αᵢ₊₁(改进)
aᵢ(标准) = aᵢ₊₁(改进)
dᵢ(标准) = dᵢ(改进)
θᵢ(标准) = θᵢ(改进)
得到转换后的标准DH:
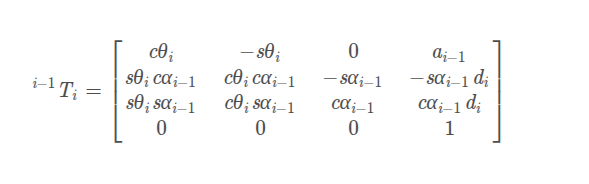
// 标准DH参数 [alpha, a, d, theta_offset]dh_params_ = {{-M_PI/2, 0, 0.123, 0}, // Joint 1{0, 0.28503, 0, -172.22/180*M_PI}, // Joint 2 {M_PI/2, -0.021984, 0, -102.78/180*M_PI}, // Joint 3{-M_PI/2, 0, 0.25075, 0}, // Joint 4{M_PI/2, 0, 0, 0}, // Joint 5{0, 0, 0.091, 0} // Joint 6};2. 准备DH变换矩阵
• 改进DH变换矩阵: