一文速览2025松灵具身智能科研论文合集!
转载 2026-02-05 10:26 松灵机器人 来源:松灵机器人
具身智能(Embodied Artificial Intelligence, EAI)是指一种基于物理身体进行感知和行动的智能系统,其通过智能体与环境的交互获取信息、理解问题、做出决策并实现行动,从而产生智能行为和适应性。
2025年,具身智能领域迎来爆发式发展,在这一关键发展周期中,松灵机器人始终深耕技术创新,同时聚焦技术成果的落地,致力于以可靠的硬件产品为科研创新提供坚实支撑。
在移动智能与具身智能科研领域,松灵机器人推出了一系列硬件产品,始终秉持合作共建、协同发展的理念,深度赋能全球科研单位、业界伙伴及科研工作者。依托松灵机器人提供的硬件支撑,众多科研客户顺利开展研究工作,并成功将研究成果撰写为学术论文发表,实现了科研价值的有效输出。
COBOT MAGIC
Scientific research papers
COBOT MAGIC是松灵基于斯坦福Mobile ALOHA架构开发的移动双臂遥操平台,专为具身智能科研移动数采场景研发,适用于远程遥控、具身智能与移动协作等前沿应用,支持高效算法验证与大规模真实世界数据采集。
#1 智源具身智能-RoboCOIN
An Open-Sourced Bimanual Robotic Data COllection for INtegrated Manipulation

项目主页:https://flagopen.github.io/RoboCOIN/
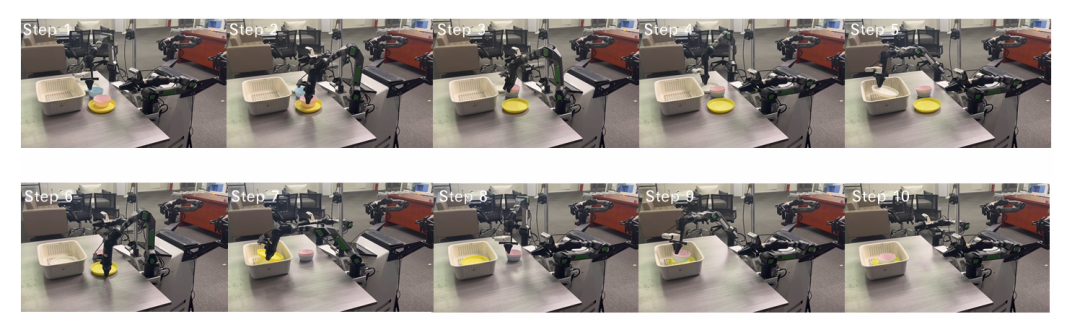
#2 极佳科技-GigaBrain-0
A World Model-Powered Vision-Language-Action Model
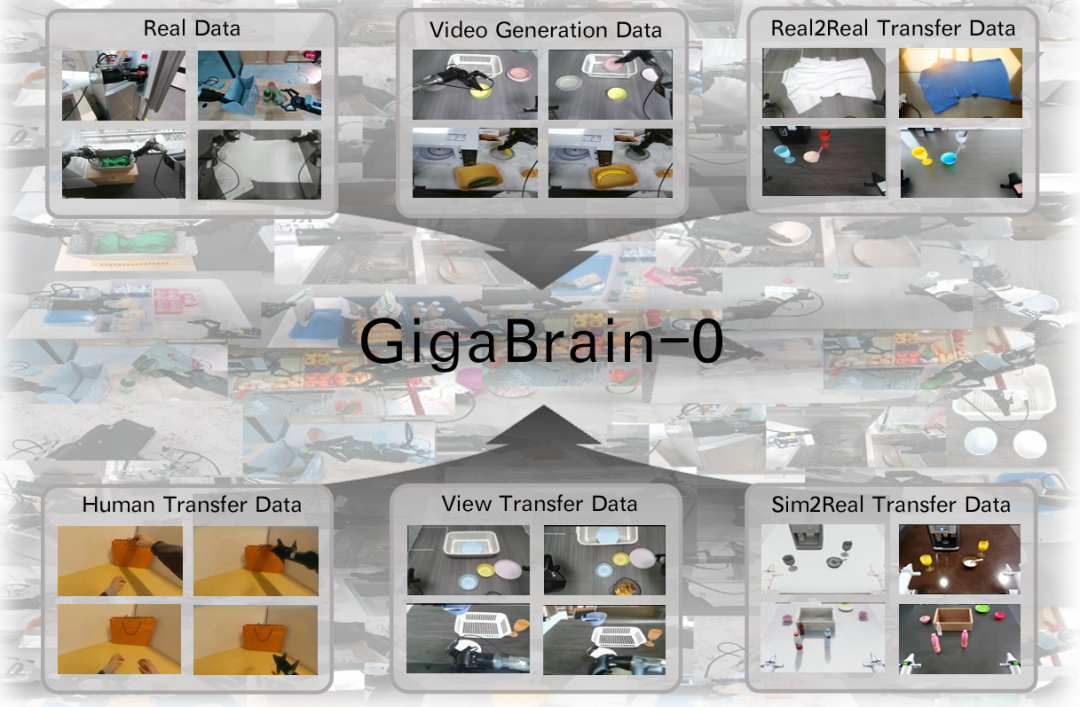
项目主页:https://github.com/open-gigaai/giga-world-0
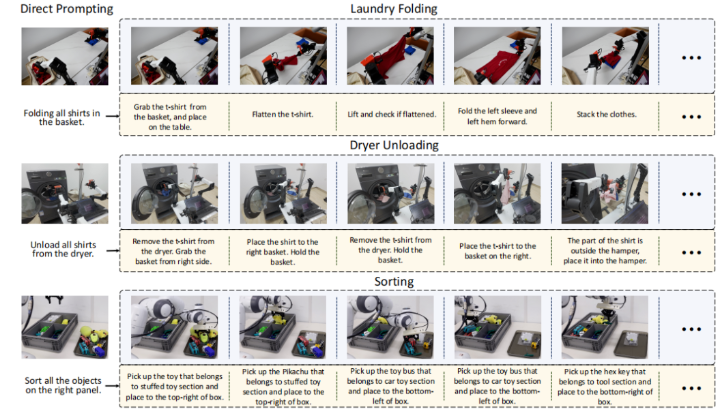
#3 清华大学-XVLA
Soft-Prompted Transformer as Scalable Cross-Embodiment Vision-Language-Action Model
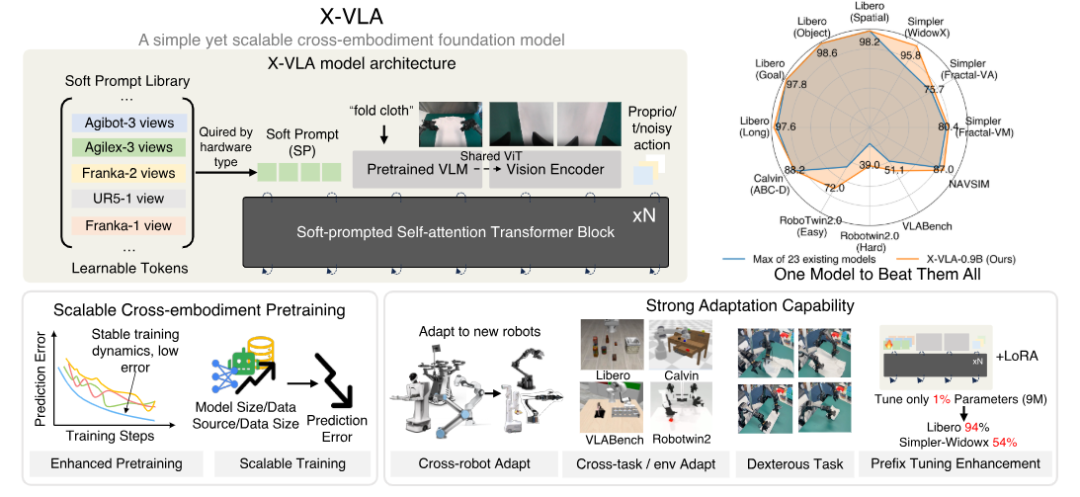
项目主页:https://thu-air-dream.github.io/X-VLA/
#4 美的 -DexVLA
Vision-Language Model with Plug-In Diffusion Expert for General Robot Control
项目主页:https://dex-vla.github.io/
#5 北京大学 -HybridVLA
Vision-Language Model with Plug-In Diffusion Expert for General Robot Control
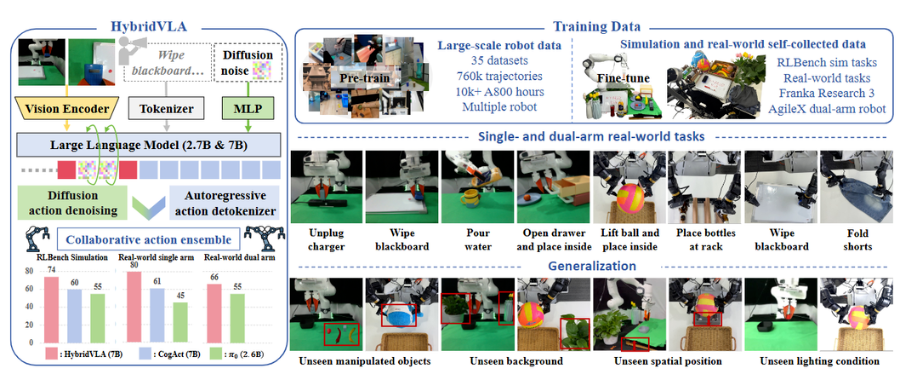
项目主页:https://hybrid-vla.github.io/
#6 创智学院 -FreeTacMan
Robot-free Visuo-Tactile Data Collection System for Contact-rich Manipulation
项目主页:https://opendrivelab.com/FreeTacMan
#7 清华大学-H-RDT
Human Manipulation Enhanced Bimanual Robotic Manipulation
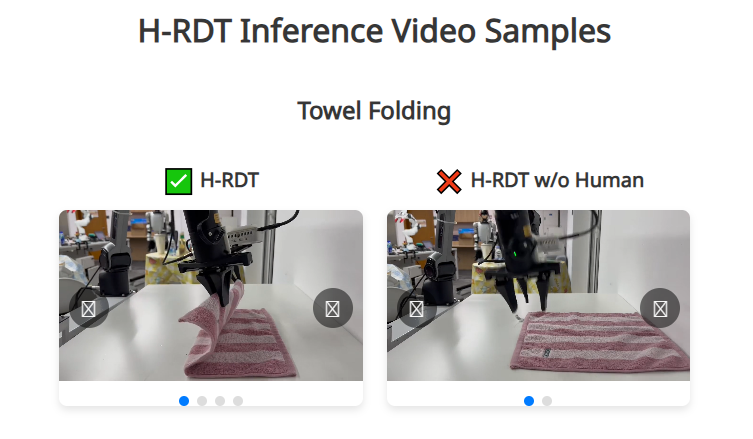
项目主页:https://exo-viha2025.github.io/
#8 智元机器人 -Genie Envisioner
A Unified World Foundation Platform for Robotic Manipulation
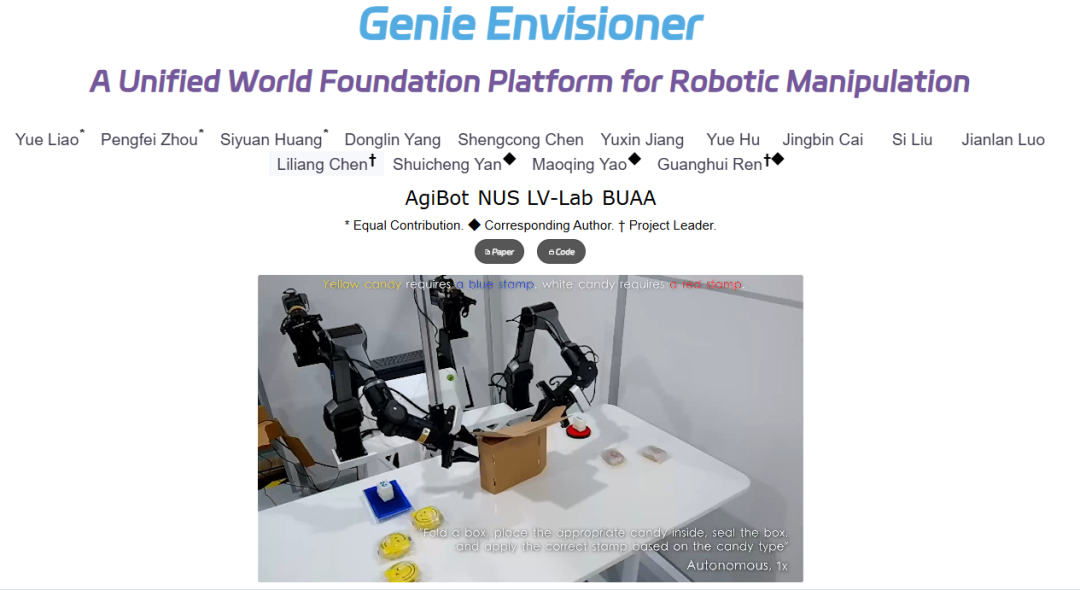
项目主页:https://genie-envisioner.github.io/
#9 蚂蚁灵波 -LingBot-VLA
A Pragmatic VLA Foundation Model
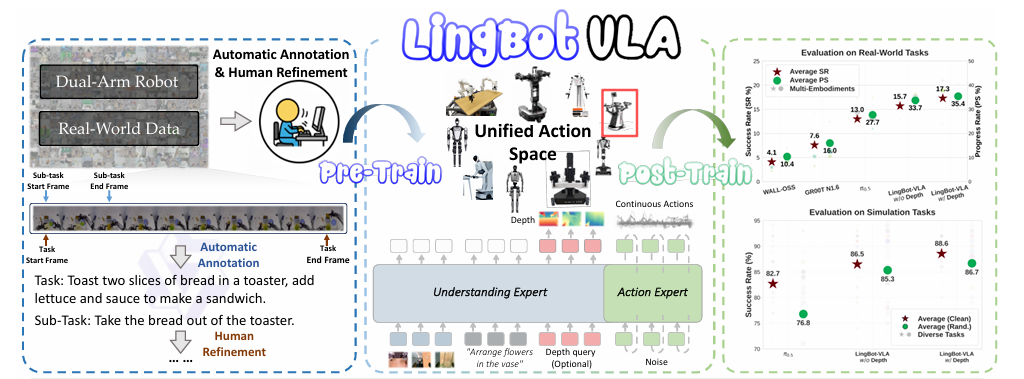
项目主页:https://technology.robbyant.com/lingbot-vla
#10 京东探索研究院 -VLP
An Atomic Skill Library Construction Method for Data-Efficient Embodied Manipulation
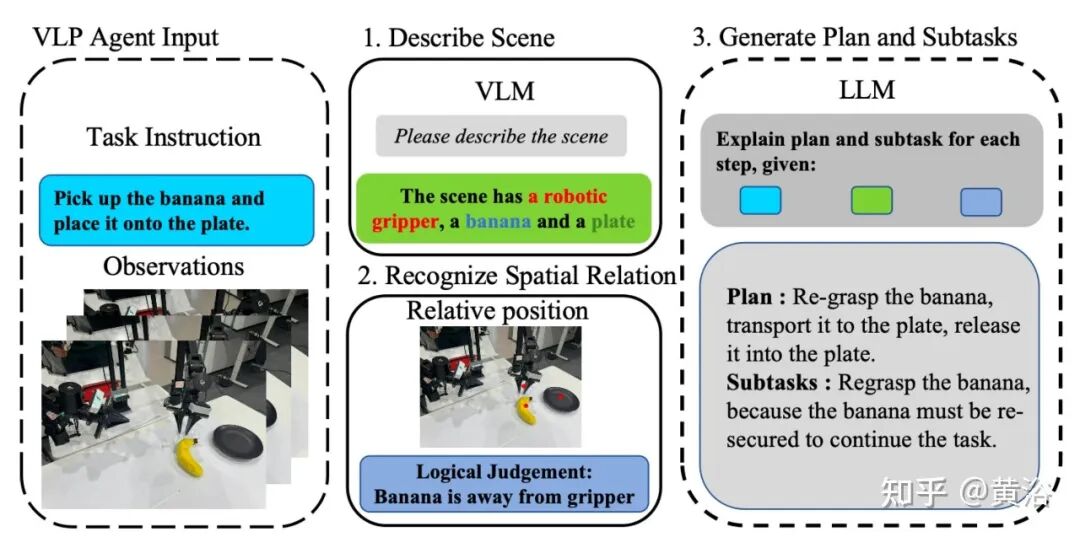
项目主页:https://technology.robbyant.com/lingbot-vla
#11 香港大学 -kai0
An Atomic Skill Library Construction Method for Data-Efficient Embodied Manipulation

项目主页:https://mmlab.hk/research/kai0
#12 地平线 -SEM
Enhancing Spatial Understanding for Robust Robot Manipulation
项目主页:https://arxiv.org/pdf/2505.16196
PiPER 6DoF
Scientific research papers
PiPER是松灵自研的轻量化六轴机械臂,面向具身智能、高校科研场景,轻量化六轴设计、开放架构,便于用户进行二次开发,通过智能化协作,可实现遥操、具身数采等教学实践和科研创新。
#13 北京邮电大学 -MoTo
A Zero-shot Plug-in Interaction-aware Navigation for General Mobile Manipulation
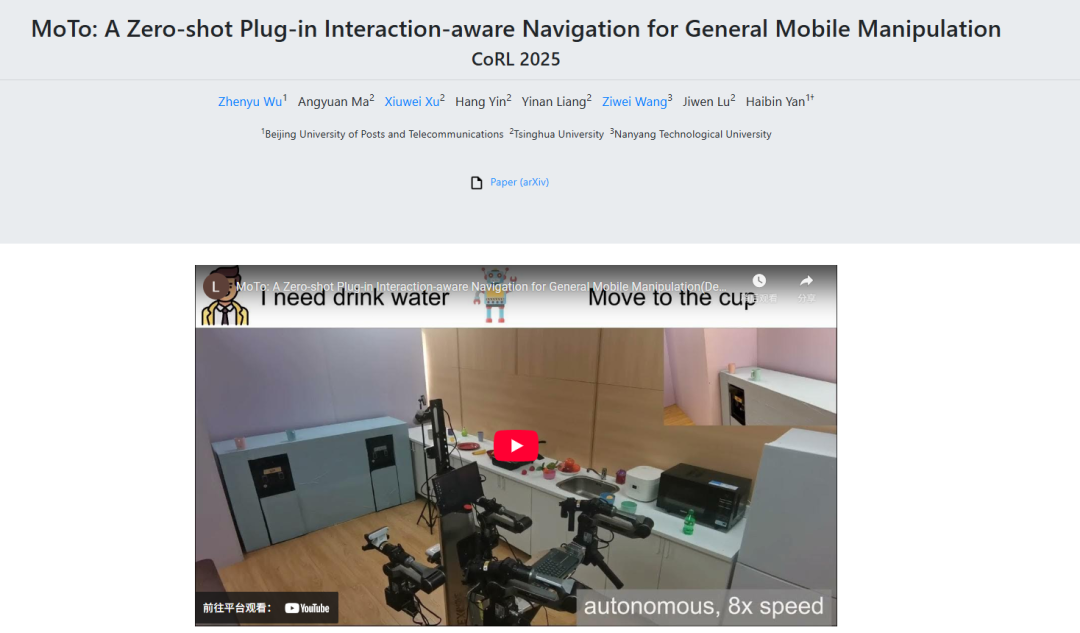
项目主页:https://gary3410.github.io/MoTo/
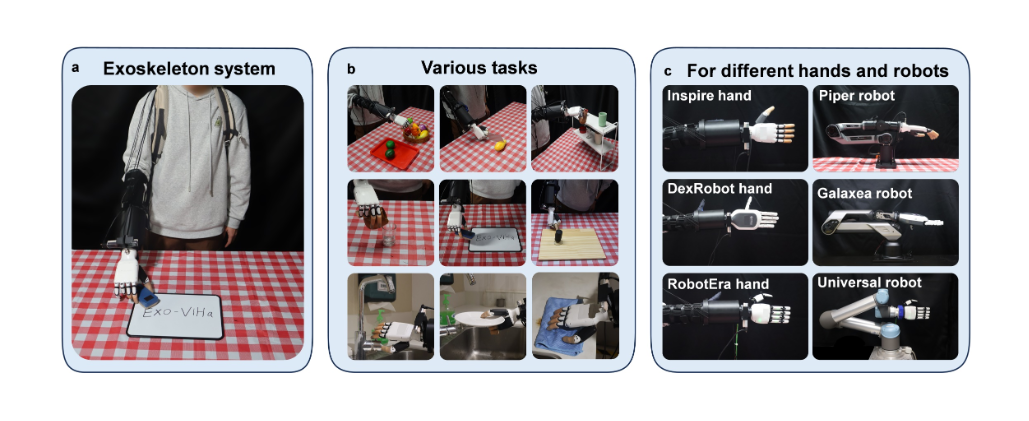
#14 清华大学-Exo-ViHa
A Cross-Platform Exoskeleton System with Visual and Haptic Feedback for Efficient Dexterous Skill Learning
项目主页:https://exo-viha2025.github.io/
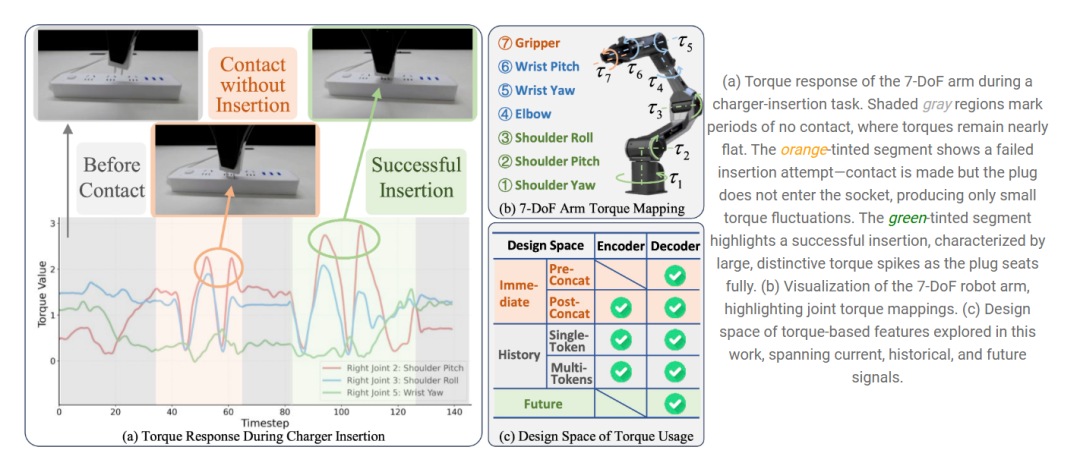
#15 智源具身智能 -TA-VLA
A Cross-Platform Exoskeleton System with Visual and Haptic Feedback for Efficient Dexterous Skill Learning
项目主页:https://exo-viha2025.github.io/
#16 宾夕法尼亚大学 -Maestro
Orchestrating Robotics Modules with Vision-Language Models for Zero-Shot Generalist Robots

项目主页:https://exo-viha2025.github.io/
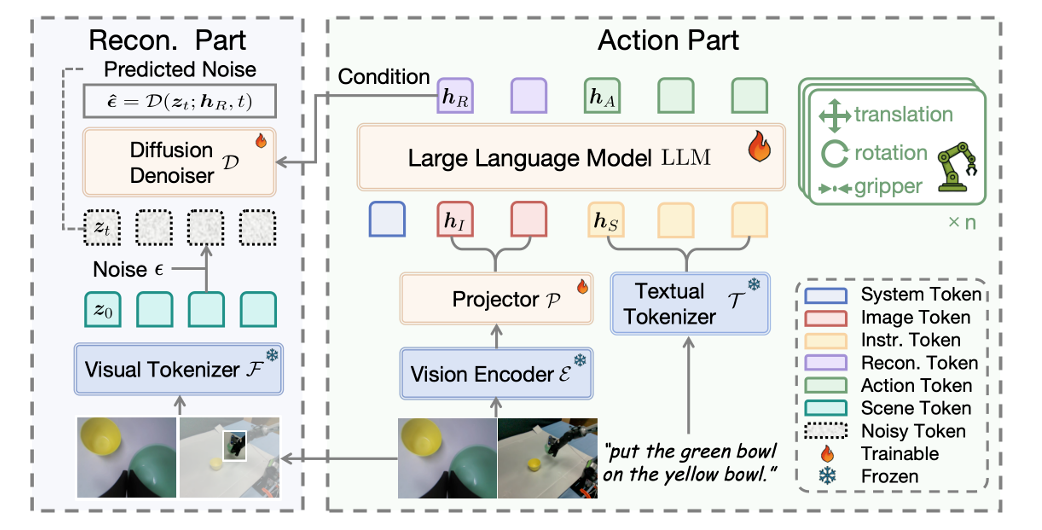
#17 香港科技大学 -ReconVLA
Reconstructive Vision-Language-Action Model as Effective Robot Perceiver
项目主页:https://zionchow.github.io/ReconVLA/
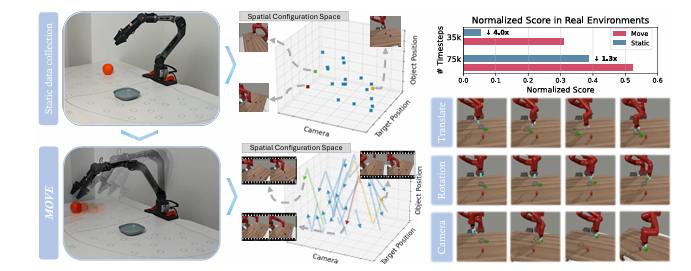
#18 智源、清华大学 -MOVE
A Simple Motion-Based Data Collection Paradigm for Spatial Generalization in Robotic Manipulation
项目主页:https://huggingface.co/papers/2512.04813
松灵机器人自成立以来,一直秉持着赋能开发者的理念,致力于为机器人行业和科研教育构建全面的开发平台。通过共享资源、交流思想、合作创新,共同构建更加完善的机器人训练数据集和测试平台,为机器人的学习和训练提供更加丰富和多样的素材。
未来,松灵机器人将继续深化与全球科研界的合作,持续优化硬件产品与服务,赋能更多科研工作者突破创新,携手共建科研生态、推动机器人领域及具身智能行业的高质量发展
欢迎更多高校与科研机构与我们携手共创,共同探索更多新的应用场景和技术方向,为机器人的广泛应用和智能化发展贡献更多的智慧和力量。
相关资讯
更多- 邀请函 | 华睿科技机器视觉生态大会·杭州站
- 新华社权威关注|AITEN 聚焦工业真实场景,让智能智造落地千行制造
- 高温高湿下,电池如何安然度夏?
- 合力 |【奋斗者说】第九期:先锋·引领
- 产能全面跃升!德马未来超级工厂投产,激活全球项目履约新动能
- AGV和RGV有何区别?
- 10款叉车同步更新:Manitou以锂电与内燃双路线重构工业车辆产品组合
- Brightpick与TREW建立合作:货到人机器人与北美系统集成能力加速结合
- Dexterity与Kawasaki扩大合作:Physical AI开始瞄准高强度仓储装卸
- Rockwell推出FactoryTalk Orchestration:把机器、人员和物料移动纳入统一编排