
移动监控机器人系列产品

产品详情
产品参数
产品图片
移动监控机器人系列产品

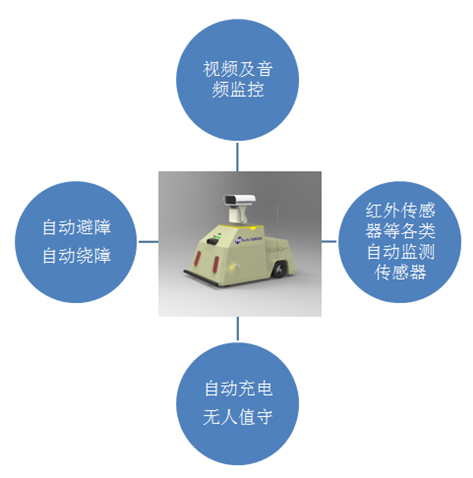
移动监控机器人可应用于室内外各种环境场合,替代人工,实施高频率、高精度的监控工作、并可通过加载的可见光摄像机、麦克风、红外传感器、红外热成像仪等设备进行广谱范围的监控工作。目前在变电站、热电厂、大型仓库、特殊环境(如放射性环境)中均已投入使用。
机器人采用视觉识别技术,可定时自动从固定地点出发,按照设定的路线行走,在各个监控点采集监控信息反馈至客户端软件,并对机器人自身状态进行实时监测并反馈。
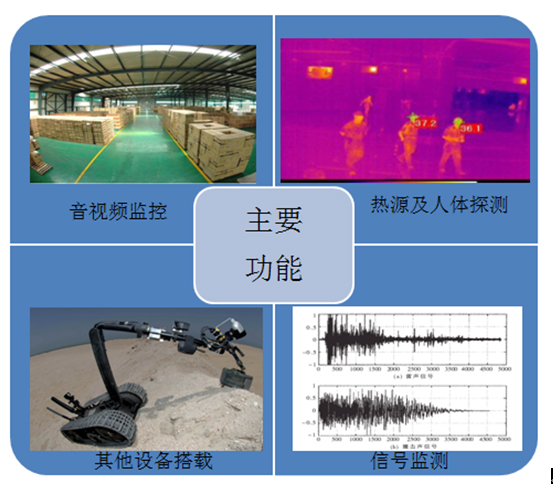
主要功能
移动监控机器人具备以下功能
机器人根据设定的检测任务,能定时自动进行并每天重复相同的巡检任务。
机器人运动模式有人工操作模式和自动行走模式,由人工操作模式切换到自动行走模式时需确保巡线轨迹在机器人巡线摄像头视场范围内。
机器人可对外可提供机器人的状态信息和操作接口,主要接口及信息包括:
1.操控指令:前后行走,左右转弯,暂停,停止指令;云台上下左右及预置位设置;返回起点,充电,关机、休眠。
2.查询和设置行走线路、定时动作、电池电量等指令。
3.报警设置和提示指令(如遇到障碍、电量不足等)。
4.其它所需的操控指令。
机器人通过设置,可自动记录重要信息,保存历史数据,具备自诊断能力。
机器人具备电量自诊断能力,当电量低于设定的警戒电量时,能自动报警并返回充电室充电(自动行走模式下)。
机器人具备夜间自动巡航功能,车体四周装有夜间识别轮廓灯。
机器人可实时反馈机器人位置信息。
机器人具备探测传感器,当遇到障碍时会可提前减速或停止;当探测传感器失效时,底盘有机械防护传感器以避免意外或设备受损。
机器人可在运行线路上的不同检测点,设置检测动作,并自动操作不同的检测设备运行(被操作的检测设备,需带通讯及二次开发能力)。
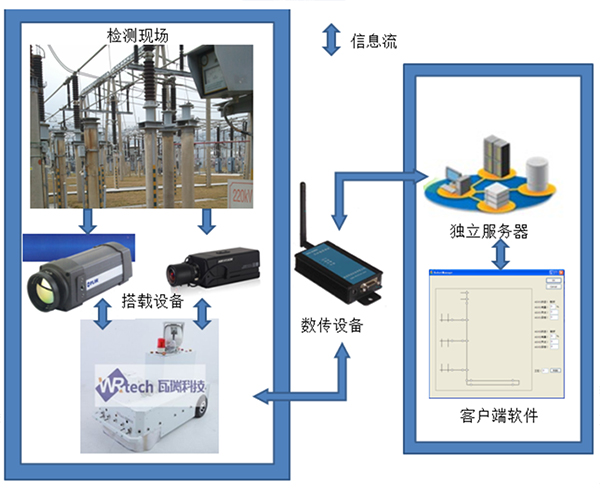
巡检系统架构
1 无线远程监控
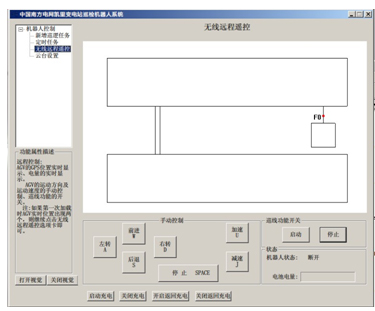
2 巡逻任务设定
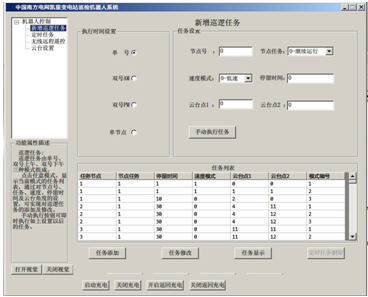
如图所示,应用户以时间及特殊要求为需求定义了四个模式,通过任务参数的设置,用户可调整机器人地图线路中任意时间的位置采集任意角度的实时数据。
3 监控视角设定
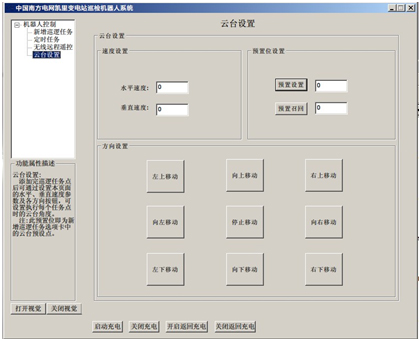
如图所示,在动作配置阶段可通过填写正确的预置设置号并调整云台的任意方向来设置某个预置号的云台位置,此功能需要和图4-2配合使用。
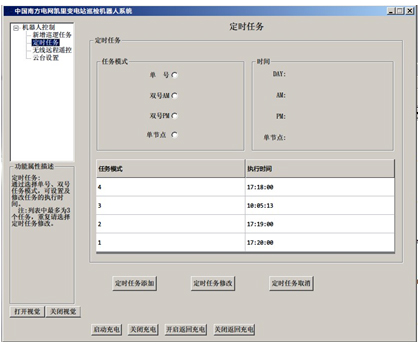
4、定时巡逻设定
5 专业数据分析
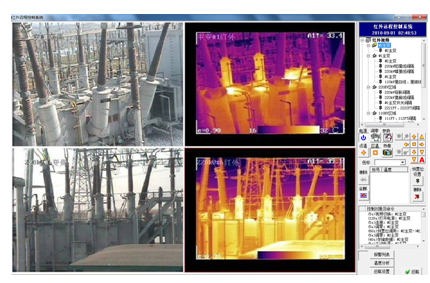
如图所示,可分为左边图像显示区域及右边设备控制区域两部分。
图像显示区域:四个窗口对应四个监视设备的实时监视图像,周围显示为红线(图中显示细红线)的窗口为当前控制所对应的窗口。在监视图像窗口上可以通过鼠标对普通摄像机进行方向控制,对红外热像仪进行温度分析控制。
设备控制区域:进行视频切换,云台控制,数据采集,巡航设置等功能。
6 预警温度设置
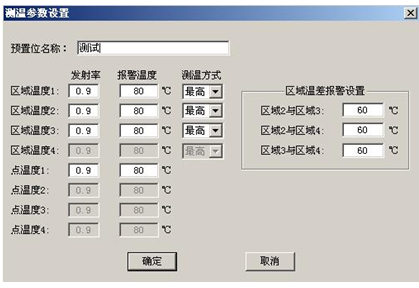
如图所示,可通过点、温控件的绘制,设置任意图像区域内的报警温度,当软件检测到图像内红外温度超过报警温度值时,系统报警提示并记录日志。
7 监控日志记录
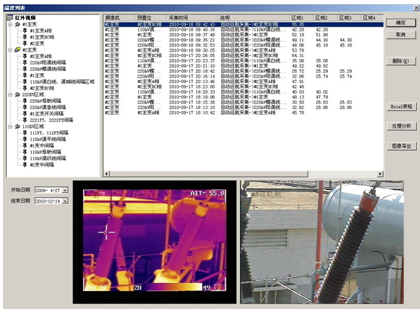
每一次系统采集图象(包括手动采集和报警),都回在列表中增加一条温度记录。选择某条温度记录,在屏幕下方就显示采集时的红外图片和相应的可见光照片。
系统缺省显示最近一个月的数据记录,如果需要可以调整“开始日期”和“结束日期”来调整数据显示的范围。
可以按动“生成EXCEL表格”按键生成预定格式的报表和温度分析曲线。如果需要修改报表格式,请修改程序工作目录下的IRTechWatch.xlt文件。
如果需要将某个测温记录的图象导出,可以使用“图像导出”功能
按动“处理分析”按键,可以将当前测温记录的红外图象采用“红外图像分析处理系统”生成处理报告。
标准配置清单
|
产品名称 |
数量 |
品牌 |
型号 |
备注 |
||
|
MSR |
1 |
驱动模块 |
1 |
瓦瑞 |
WR-MSR- 001-Ⅲ-002-1 |
可0º回转,进入各类支路巡检。 总负载能力:100kg。 可通过10mm高的障碍物。 |
|
2 |
导航模块 |
1 |
瓦瑞 |
WR-MSR-MVS-Ⅰ |
可引导机器人按照设置的线路(地面胶带或者油漆线条,线条宽度大于50mm,小于80mm,线条和路面颜色反差明显,路面为水泥路面时,线条颜色为白色)自动巡线行走,该线路应是惟一的。 |
|
|
3 |
控制模块 |
1 |
瓦瑞 |
WR-MSR-002-Ⅰ |
进口PLC。 |
|
|
4 |
电源模块 |
1 |
瓦瑞 |
WR-MSR-003-Ⅰ-001-1 |
铅酸蓄电池组,48V。 |
|
|
5 |
无线模块 |
1 |
瓦瑞 |
WR-MSR-011-Ⅲ |
无线串口。 |
|
|
6 |
电源管理模块 |
1 |
瓦瑞 |
WR-MSR-015-1 |
机器人供电管理模块。 |
|
|
1 |
瓦瑞 |
WR-MSR-015-2 |
外部搭载设备供电管理模块。 |
|||
|
7 |
接触式防护模块 |
1 |
瓦瑞 |
WR-MSR- 004-Ⅱ-001-2 |
接触式安全压条。 |
|
|
8 |
非接触式防护模块 |
1 |
瓦瑞 |
WR-MSR-004-Ⅰ-001-2 |
红外探测器,规避障碍。 |
|
|
9 |
节点识别模块 |
1 |
瓦瑞 |
WR-MSR-016-Ⅰ-1 |
|
|
|
10 |
GPS定位模块 |
1 |
瓦瑞 |
WR-MSR- 020-Ⅰ |
差分高精度GPS定位。 |
|
|
11 |
自反馈定位模块 |
1 |
瓦瑞 |
WR-MSR-020-Ⅱ |
机器人姿态定位。 |
|
|
12 |
防静电模块 |
1 |
瓦瑞 |
WR-MSR-023 |
|
|
|
13 |
封装 |
1 |
瓦瑞 |
|
IP43。 |
|
|
14 |
自动充电模块 |
1 |
瓦瑞 |
WR-MSR-010-Ⅰ |
|
|
|
15 |
数传模块 |
1 |
|
|
|
|
|
16 |
冷却系统 |
1 |
瓦瑞 |
|
|
|
|
探测设备 |
1 |
承载模块 |
1 |
亚安 |
WR-MSR- 018-Ⅰ |
云台。 |
|
2 |
红外热成像仪 |
1 |
FLIR |
WR-MSR- 029 |
原装进口。 |
|
|
3 |
视频监控 |
1 |
海康威视 |
WR-MSR-024-1 |
|
|
|
附件 |
1 |
电池充电器 |
1 |
瓦瑞 |
WR-MSR-006 |
|
|
2 |
操作手柄 |
1 |
瓦瑞 |
WR-MSR- 007-Ⅱ |
无线操作手柄。用户可通过手柄控制机器人的运动。 |
|
|
3 |
控制软件 |
1 |
瓦瑞 |
WR-MSR-013-2 |
定制地图系统,同时用户可通过控制软件控制机器人的运行。 |
|
|
4 |
自动充电站 |
1 |
瓦瑞 |
WR-MSR- 009-Ⅰ |
|
|
|
|
5 |
红外测试软件 |
1 |
瓦瑞 |
|
根据红外热成像仪功能定制开发。 |