




四轮差动机器人移动底盘 接口丰富 软件开源 室外巡检机器人 探险越野机器人
品牌:成都航发

产品详情
产品参数
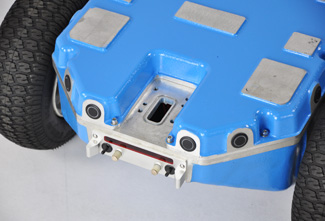
产品图片
| 机身形式: | 铝合金一体成型 | 外形尺寸: | 698×598×279mm |
| 驱动轮: | 265橡胶充气轮 | 驱动轮直径: | 262mm |
| 驱动方式: | 四电机四轮驱动 | 悬挂形式: | 无悬挂 |
| 车身最小离地间隙: | 73mm | 整机重量: | 39kg |
| 额定负载能力: | 80kg | 电机类型: | 直流无刷伺服电机 |
| 电机额定功率: | 200W | 电机编码器: | 2500线/转,A、B相输出 |
| 电机数量: | 4 | 电机驱动: | 伺服驱动器,CAN总线、RS232通信接口 |
| 最大移动速度: | 1.35m/s | 最大自转速度: | 160°/s |
| 最小转弯半径: | 0m | 适应的地形: | 室内、室外普通路面及泥泞路面 |
| 典型续航时间: | 约12h(负载10kg,运行速度1m/s,运行率70%) | 待机时间: | >30h |
| 车载电源输出: | 5V@5A / 12V@5A / 24V@5A / 电池电压(35.2~46.2V)@>10A | 电源保险管预设规格: | 5×20/20A |
| 电池: | 48V/18.2Ah锂离子电池 | 电池快速更换: | 支持 |
| 充电器: | 输入:AC100V~240V / 充电电流:5A / 接口:直插式 | ||
| DEMO开发板: | RHF407开发板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,USB×1,ADC×8,DAC×2,PWM×8,LED×2,按键×2, 独立I/O×24,可复用I/O×29,TF卡接口×1,RTC后备电池座,可复用TFT LCD接口×1) | ||
| 附件: | 电池充电器 | ||