产品详情
产品参数
产品图片
1名操作人員的空間内可設置2台。
1kg可搬級別中世界最小的6軸設計。
最适合用于无尘车间内的小型电子零部件组装作业。
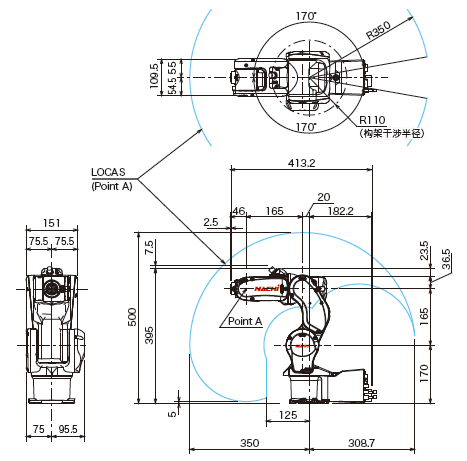
外形尺寸和动作范围
![]()
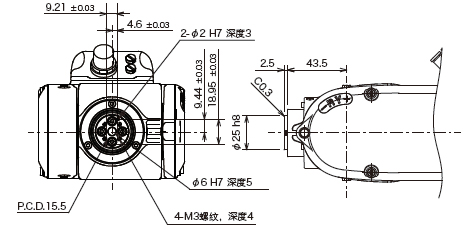
手腕详细图
![]()
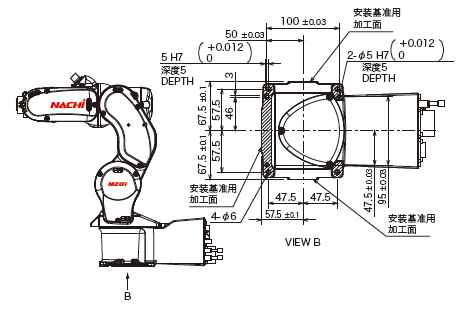
安装详细图
![]()
| 机器人型号 | MZ01-01 |
| 构造 | 关节型 |
| 关节数 | 6 |
| 驱动方式 | AC伺服方式 |
| 最大动作范围 | J1 | ±2.97rad (±170°) |
| J2 | -1.57 ~ 1.48rad (-90 ~ 85°) |
| J3 | -0.87 ~ 1.57rad (-50 ~ 90°) |
| J4 | ±2.53rad (±145°) |
| J5 | ±2.18rad (±125°) |
| J6 | ±6.28rad (±360°) |
| 最大速度*※1 | J1 | 5.59rad/s (320°/s) |
| J2 | 5.59rad/s (320°/s) |
| J3 | 6.54rad/s (375°/s) |
| J4 | 10.47rad/s (600°/s) |
| J5 | 10.47rad/s (600°/s) |
| J6 | 10.47rad/s (600°/s) |
| 可搬质量※2 | 手腕部 | 额定1.0kg |
| 第1手臂部 | 最大0.25kg |
| 手腕允许 静负荷扭矩 | J4 | 0.9N·m |
| J5 | 0.9N·m |
| J6 | 0.78N·m |
| 手腕允许 最大惯性力矩※3 | J4 | 0.008kg·m2 |
| J5 | 0.008kg·m2 |
| J6 | 0.006kg·m2 |
| 位置反复精度 ※4 | ±0.02mm |
| 最大工作半径 | 350mm |
| 空气配管 | IN:Ø6×2、OUT:Ø4×2 |
| 应用信号线 | 12芯 |
| 设置方法 | 落地式/悬挂式 |
| 设置条件 | 环境温度:0 ~ 40C°※5 环境湿度:20 ~ 85%RH(无结露) 安装面的振动值:0.5G(4.9m/s2)以下 |
| 耐环境性※6 | 机器人主体 对应于IP40 |
| 洁净度※7 | ISO 14644-1 CLASS5(基准) |
| 噪音级别※8 | 70dB |
| 主体质量 | 10kg |
1[rad]=180/π[°] 1[N・m]=1/9.8[kgf・m]
※ 不具备防爆功能。
※1 一览表中最大速度为最大值,根据作业程序及手腕负荷条件而变化。
※2 第1 手臂(第3 轴的手臂)部没有负荷时,手腕负荷最大为1.0kg;第1 手臂部的负荷为0.25kg 时,手腕负荷最大为0.75kg。
※3 根据手腕负荷条件,手腕允许惯性力矩有所差异,应予以注意。
※4 依据“JIS B 8432”标准。
※5 在海拔1,000m 以下使用。超过允许高度时,环境温度受到限制。
※6 请勿使用有机溶剂、酸、碱、氯、汽油类切削液等可导致密封材质劣化的液体。电缆部位对应于IP65,控制柜对应于IP20。
※7 需要确保洁净度时,应设置在具有下降流(down flow) 设备的洁净室。
机器人未采用防尘捆包规格,因此需要清除机器人上尘埃、粉尘后将搬进洁净室。
※8 根据JIS Z 8737-1 (ISO 11201) 测定的A 负荷等价噪音级别。(在额定负荷、最高速度下的运转)
![]()