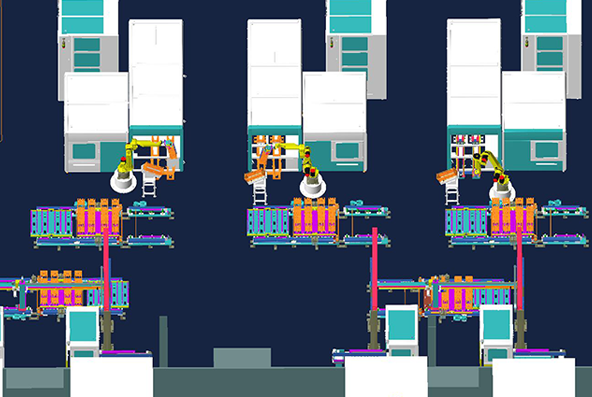
系统采用工业机器人实现电池花篮的上/下料动作、采用智能移动平台AGV小车实现花篮在工序间的智能运载输送、采用地面AGV智能站台系统实现花篮的储存及中转,AGV移动平台组群采用信息化的调度系统实现100%全柔性规划调度,全线采用总控的自动化管理系统对全线功能设备进行自动化控制及生产管理,系统已经初步投入运行使用,运行状态及生产效益初步显现。
分享到: