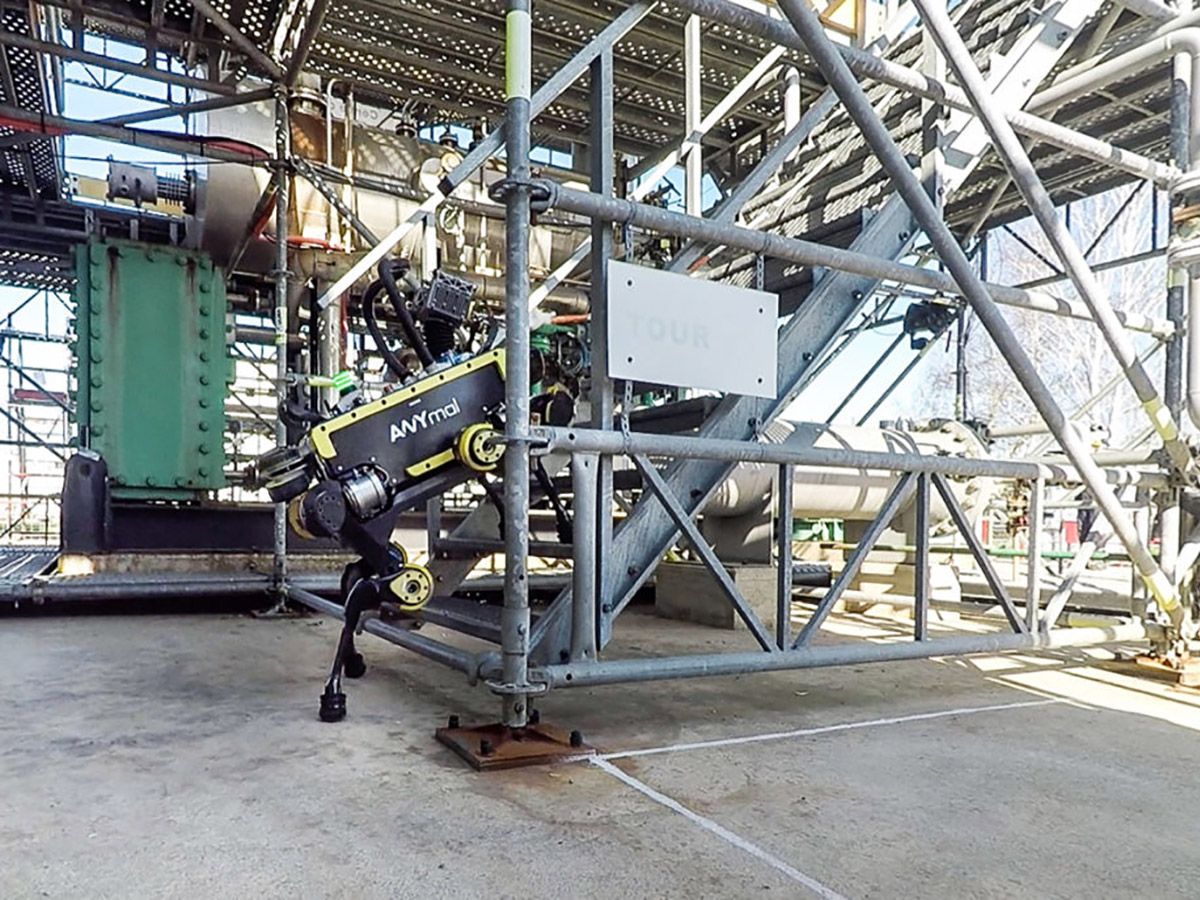
ANYmal是一款四足机器人,专为在挑战性环境中自主运行而设计。对于我们的ANYmal平台,我们正在开发传感器集成和脚位。我们还将研究在机器人主体下方增加滚轴/滚轮的方式来进行腹部爬网式运动的发展(请注意,这假定相对平坦的环境)。
分享到: