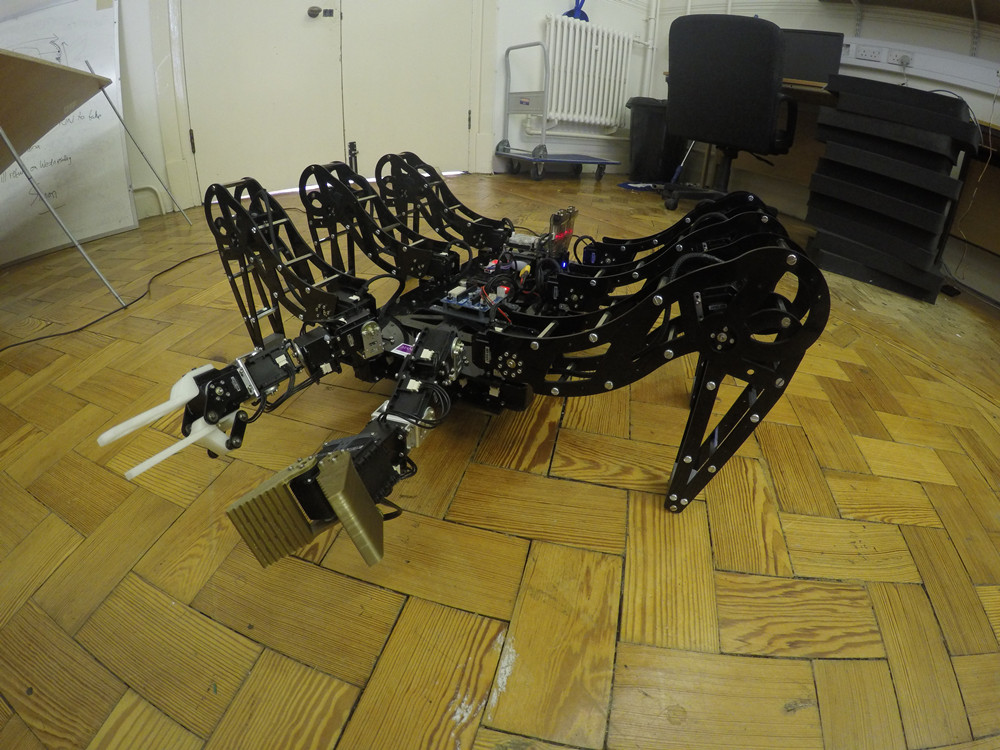
能够在危险环境中自动移动以进行远程检查和物体操纵的六足动物的开发。这项工作的主要动机是为六脚架构建并配备合适的硬件工具和软件算法,以使其能够协助或执行退役任务。
工作包包括开发具有对象操纵功能,高有效载荷,动态和静态稳定性功能的六足机器人,以便在环境中进行操纵。
分享到: