
纳博特 工业机器人技术控制系统
产品详情
产品参数
产品图片
纳博科技工业采用EtherCAT机器人技术控制系统,IEC61131-3标准,支持各类EtherCAT模块;基于X86 IPC+RTOS设计,自主研发控制算法,支持六轴自由度机器人、SCAR机器人、五机器人、连杆码垛机、四轴多关节机器人、DELTA机器人、直角坐标机器人、多轴专用机器人等机器人的控制机器人。
自带料、码垛焊接、缝缝、、激光切割、跟踪观察、碰撞检测、牵引等通用工艺、拖带教用户根据需求进行定制;同时提供完整的API接口,同时提供完整的API接口,可根据需要方便、方便地开发专用工艺(PApp)与专用工艺界面(PUI)。
产品特点扩展性良好。NRC系列机器人控制器采用的EtherCAT,的PowerLink总线实现伺服主从站连接,支持最多64轴同步运动,广泛应用于机器人,CNC设备的控制。相比传统脉冲控制型方案,大幅降低系统布线维护成本,可扩展性与您。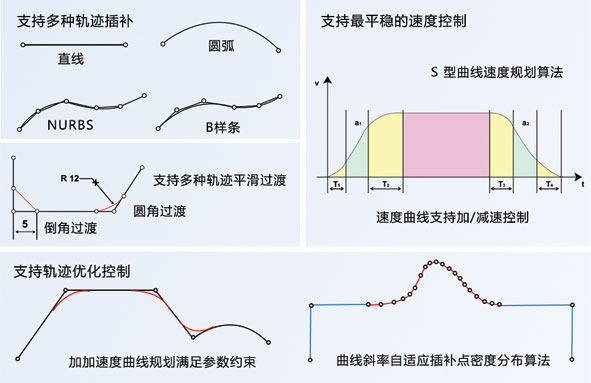
NRC支持多机器人协作和二次开发。NRC支持多机器人协作,能同时完成4台机器人的协作控制,并支持客户进行二次开发。
产品参数| 控制器 | 处理器:X86 4核2.0G 内存:2G 存储空间:32G |
| 示教盒 | 8寸TFT-LCD彩色液晶屏 Linux+QT系统全触摸屏操作 选择机器人实时使用 开关 安全开关急停按钮 |
| 控制轴数 | 标准:6轴垂直地关节机器人可选配:1轴轴、2轴轴变位机、3轴龙门架 |
| 控制伺服器 | EtherCAT、Sercos III、CANopen、PowerLink |
| 模式操作 | 示教模式、再现模式、远程模式 |
| 编程方式 | 示教辅导、电话辅导、电话示教 |
| 运动功能 | 点到点、直线、圆弧、样条曲线、直线横、FLYBY |
| 系统指令 | 运动指令、指令指令、输入输出指令、运算指令 |
| 位置控制方式 | 点到点控制 连续持续控制 |
| 坐标系统 | 关节坐标系、机器人坐标系、工具坐标系、用户坐标系 |
| 结构算法 | 4轴直角轴机器人C轴4轴制机械手 6轴多关节4轴连码4轴直角坐标机器人 |
| 应用 | 组装、点胶、焊接、拆除、托盘、切割、打磨码、封装等 |
| 电源 | 24V 60W(控制器功率30W,示教盒30W) |
支持一台机器人同时控制4台,每台机器人的参数、程序独立,在运行及远程模式下令所有机器人同步、停止在支持一台多台机器人的同时也可以支持每台机器人运行用于任意种类的外部轴,包括地轨、变位机、门架;同时支持双龙协作模式,可令两台机器人的启停完全同步。
自带通用工艺编组、跟踪堆垛、焊接、切割、跟踪观察、碰撞检测、牵引等通用工艺系统、通用工艺带显示焊缝根据用户需求进行定制。功能,用户可以方便快捷的实现所需工艺。
开放接口纳特机器人开放平台NexDroid开放API,人人都可以掌握应用。基于/C++/Python/Lua进行二次支持,将核心提供在自己的手操作开发中的应用开发经验的知识产权和领域经验。
离线编程纳博系统编程技术,支持多款开源编程,RobotMasterD、RobotMaster、RocamD支持多个领域,可离线支持、支持多种领域K。
任意在机器人精度支持下,NRC控制系统的精度可达到±0.4mm以内,重复定位精度可达到±0.02mm系列以内。
编程灵活除了传统的示教器编程,还提供PC示教软件和智能手机式触摸屏编程模式。