【仙知小课堂】仙知网络协议API使用教程(六)
转载 2019-08-13 18:39 Seer Robotics 来源: 仙知机器人Seer
为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。之前分别介绍了仙知网络协议API的概念、类别、使用教程及如何查询机器人状态API中的“机器人信息”和“机器人运行信息”等,本期将介绍“如何查询机器人自由导航路径数据”、“如何查询机器人当前所在区域”及“如何查询机器人急停状态”:
如何查询机器人自由导航路径数据
查询机器人自由导航路径数据
请求
编号: 1010 (0x03F2)
名称: robot_status_path_req
描述: 查询机器人自由导航时的路径数据
JSON 数据区: 无
请求示例

响应
编号: 11010 (0x2B02)
名称: robot_status_path_res
描述: 查询机器人自由导航时的路径数据的响应
JSON 数据区: 见下表
响应示例

数据示例
如下为五个激光点的数据

如上的路径由 5 个点组成,5 个点分别为 (1.0, 1.2), (2.0, 1.3), (3.2, 2.1), (3.4, 1.4), (3.9, 1.5), 其坐标值为在世界坐标系中的坐标, 将这 5 个点按顺序连接即为机器人当前规划的路径。
响应示例

如何查询机器人当前所在区域
查询机器人当前所在区域
请求
编号: 1011 (0x03F3)
名称: robot_status_area_req
描述: 查询机器人当前所在的区域信息
JSON 数据区: 无
请求示例

响应
编号: 11011 (0x2B03)
名称: robot_status_area_res
描述: 查询机器人当前所在的区域信息的响应
JSON 数据区: 见下表

数据示例

响应示例

如何查询机器人急停状态
查询机器人急停状态
请求
编号: 1012 (0x03F4)
名称: robot_status_emergency_req
描述: 查询机器人急停按钮的状态
JSON 数据区: 无
请求示例

响应
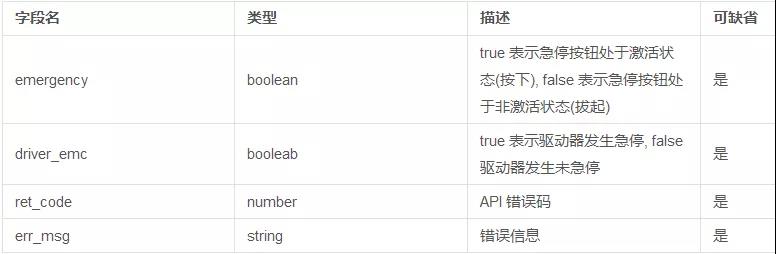
编号: 11012 (0x2B04)
名称: robot_status_emergency_res
描述: 查询机器人急停按钮的状态的响应
JSON 数据区: 见下表
数据示例:

响应示例
略
相关资讯
更多- 华为云、Deepseek、Kimi、零次方等20家TOP模型企业齐聚,共创具身智能产业新范式
- 稳跑 2 年实测|牧星设备从容迎战 618 高强度订单峰值
- “上岗不摸鱼,搬运不打烊”—比亚迪平衡重式AGV实力尽显!
- 当公牛开始向细节要答案,一场无声的3C智造革命正在发生
- 破解无人车补能难题|爱普拉AGV无线充电机助力低速无人驾驶规模化落地
- 买叉车趁现在 | 618现已开启!硬核底价,全场直降
- 杭叉集团|深化“链主”牵引 共筑产业新生态——杭叉集团成功承办杭州市智能物流装备产业链对接活动
- OT10全球首秀|劢微机器人携智能物流机器人及数字孪生系统亮相LET 2026
- 海外展会 | 镭神智能诚邀您参加ILA Berlin 2026德国柏林航展
- 杭叉集团|杭叉集团与哈工鹏泽达成战略合作 拟共建智能清洁机器人合资公司