科普 | 如何快速部署一台MiR移动机器人
转载 2020-03-26 09:58 MiR 来源:MiR
从开箱开始
打开运输用木箱后,可将顶板放置在托板后方作为斜坡供小车行驶到地面(注意:出厂的运输木箱可供重复使用,建议保留)。

开机前,需要确认整车的电源开关是否均已打开。排查顺序:电池接插件→车前断路器→车尾电源开关。



连接急停按钮盒,天线并按下开机键。


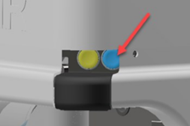
待急停盒复位指示灯亮起后按下,打开终端设备(手机/Pad/PC)的WIFI功能并搜索连接至车内自带热点MiR_XXX。
使用界面上的虚拟摇杆控制MiR行驶到地面(初次操作者建议小幅度推动摇杆来适应速度)。


扫描地图
MiR内置SLAM导航技术,通过实时匹配激光数据与地图数据来实现精准定位。因此,记录地图作为使用MiR的第一步骤以外,同时会影响MiR在后续使用过程的重要元素。
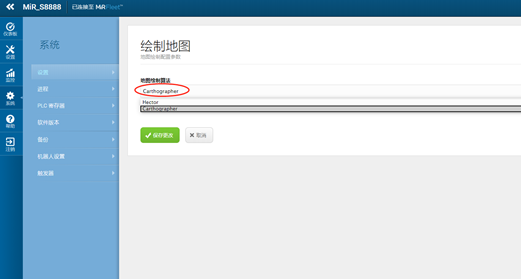
在绘制地图之前请确认绘制地图的算法为:Carthographer。
进入地图录制界面,点击记录覆盖当前地图:
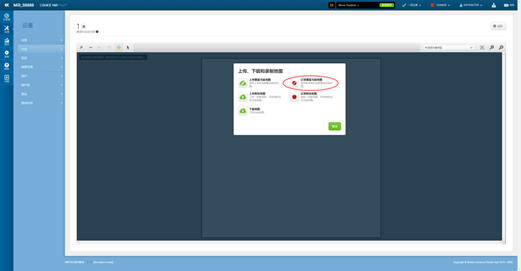
使用摇杆驱动机器人并开始录制地图。录制过程中建议先录主线,后录分支,最后返回录制起始位置形成一个完整闭环。录制完的地图需要旋转对齐,使路径与地图的X-Y轴方向一致。

一个简单循环
在完成地图的绘制后,如何让MiR自主地运行起来呢?最快捷的方式就是简单的在地图上添加几个位置并编辑一个点位间循环运输的任务。
创建点位
菜单栏:设置-地图,选择我们刚才扫描的地图即可进入地图编辑界面,右上方下拉栏选择位置属性并点击左上方的【创建】,点位的位置可以直接通过鼠标点击或者直接输入坐标方式添加。

创建任务
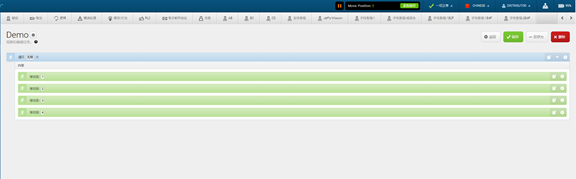
菜单栏:设置-任务,点击进入任务编辑界面。这里我们用一个无限循环内嵌套了4个动作指令作为实例,这也是比较常见的在客户现场初次演示Demo使用的任务。
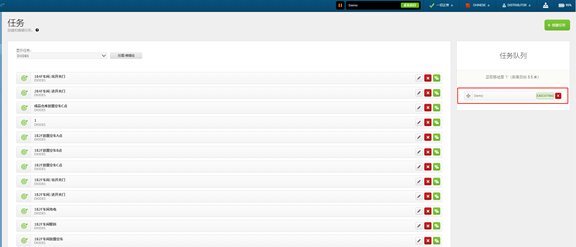
执行任务
菜单栏:设置-任务,界面中找到我们刚才编辑的任务点击,开始运行。同时你可以在任务队列中看到这个任务的运行状态。
相关资讯
更多- 永恒力启动新一代EFG系列锂电平衡重叉车销售
- 美国车载式叉车生产商Donkey Forklifts迎来创立40周年
- 冷库托盘位从2000个增至逾1.5万个:KNAPP以SAP EWM打通Derstine’s两座温控仓
- 优必选携手哈萨克斯坦:共建中亚具身智能新生态,打造“一带一路”科技走廊
- WAIC 2026 | 智元最强“打工天团”集结,未来工作现场见!
- 仙工智能具身智能家族集结亮相|2026 亚太国际具身智能产业链展览会,青岛开展!
- 镭神智能机械式多线防爆(本安和隔爆)激光雷达:煤矿石油化工高危场景适配方案
- 生态大会|睿享同行共筑产业生态,视觉领航深圳智造未来
- 二十载深耕破局出海 环信配件打造中国工业车辆配套出海新标杆
- 直击青岛物流装备展|中国超窄通道叉车销量榜首合肥搬易通(MiMA 米玛)现场交付!