案例分享 | 移动机器人防跌落及碰撞处理办法集合
转载 2020-05-11 10:29 北醒Benewake 来源:北醒Benewake
移动机器人按照室内外应用场景分类,可以分为室内机器人、室外机器人。室内机器人包括仓储AGV、室内扫地机器人、服务机器人、餐饮机器人等,室外机器人包括物流配送机器人、电力巡检机器人、室外安防机器人、室外清扫机器人等。

图1 机器人部分应用场景
当移动机器人在工作过程中,遇到如楼梯、深坑、墙壁等阻碍时,能够及时停止并绕行,防止摔坏造成误工是体现机器人智能化的重要一环。本文从各类机器人防跌落、防碰撞需求出发,介绍一款专为机器人设计的激光雷达距离传感器TFmini-S(产品传送门),并结合实际案例分别详述其安装方法及特点。
图2 台阶和墙壁等阻碍物
01
机器人防跌落&避障需求
机器人在选择防跌落&避障传感器的时候,考虑因素众多,可以从周围使用环境,以及障碍物的尺寸、形状、距离位置、姿态、材质等需求出发,选择最佳传感器,使机器人及时做出例如刹车、减速、转弯等反应,避免在台阶或凹陷处跌落。
按避障距离分类:
近距离(1m内)中距离(4m内)远距离(4m外)
按被测物体分类:
体积大or小,移动or静止,颜色明or暗,材质及平整度等等
按使用环境分类:
雨水潮湿,高温强光,漆黑昏暗等等
图3在黑暗环境下不同大小障碍物
02
激光雷达防跌落&防撞传感器
涉及机器人防跌落和防撞的传感器众多,普遍被大家所熟知的:红外、超声波、视觉,还有大众认知相对较少的激光雷达。以北醒TF系列单点测距&避障激光雷达来看,其身材娇小,波束角小误报率低,测量精度高,刷新频率高,满足人眼安全,不易受到强光等外在环境干扰。最重要的是,基于北醒不断量产和技术更迭,价格已不再是激光雷达传感器的门槛。

图4 TFmini-S激光雷达实拍图
应用原理
通过对目标物发射一束小角度的激光或近红外光,通过ToF (Time of Flight) 时间飞行原理,根据从物体反射回来的信号时间差来计算这段距离,从而得出物体与激光雷达的相对位置,及时躲避障碍物或深坑。
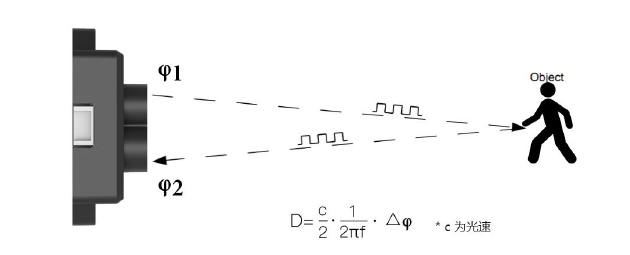
图5 北醒激光雷达原理示意图
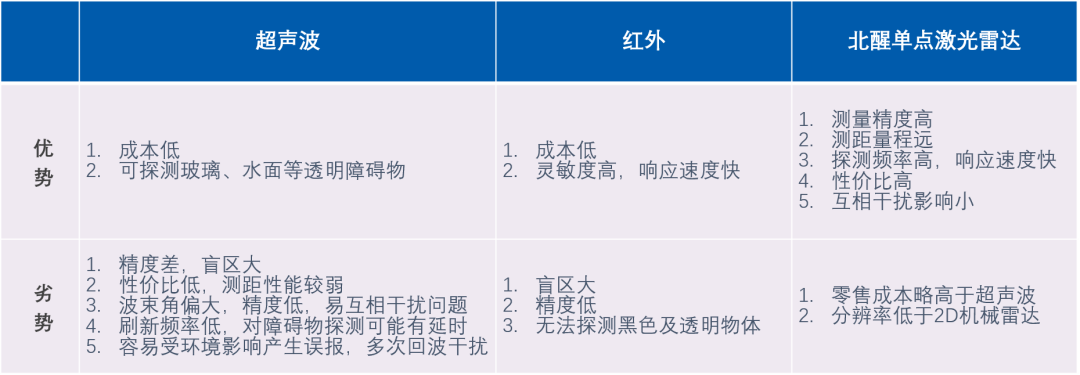
表一、各传感器优劣分析
安装方式
大多数机器人有两个车轮,北醒TF系列激光雷达视场角较小(2°~3.6°),建议使用2个雷达、分别安装在车身的左右两侧,增大探测范围和安全冗余,若机器人本身尺寸较小,也可以机身前方仅安装1个雷达。
雷达的安装高度建议距离地面30~50cm,倾斜角度(如图6所示β:雷达出光方向与水平面的夹角)建议在20-60°中间。注意:安装时不能遮挡雷达的视场范围,否则会造成测距不准确、有效量程衰减,在遇到波动的水面等高反光路况下,雷达数据的可信度会有所降低。多传感器数据综合应用是一个可以提升可靠性的方法。
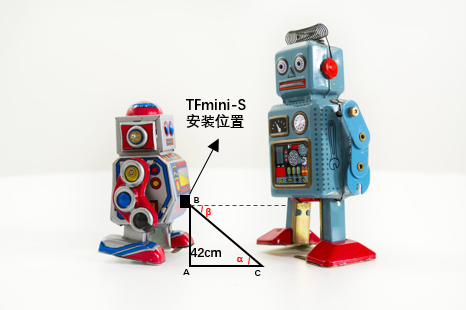
图6 北醒激光雷达安装示意图
举个例子:如图6所示,当激光雷达安装高度42cm,即图中AB=42cm;∠a=30°,根据三角函数得出BC=42/Sin∠a=84cm。总结:角度∠a参数建议在:20°-60°,安装高度建议在30-50cm,否则会造成精度降低和有效量程缩短。
03
案例分享
一、平衡车
机器人机身距离地面42cm高度处,安装2台TFmini-S分别向左下方、右下方探测,机器人直立状态下雷达出光方向与水平地面夹角为15°,机器人在前倾、后仰过程中与地面夹角变化为10~57°,雷达实时探测机器人斜下方的距离并反馈给MCU,MCU结合雷达距离信息和机器人俯仰角度,判断前方是否有台阶、凹陷,进而做出减速、刹车或转向等动作。
二、防疫机器人
机器人机身距离地面30cm高度处,安装1台TFmini-S与地面夹角16°,倾斜探测斜下方1.1m处的障碍物,当有台阶时,雷达距离会变大,机器人根据雷达数据的变化可以做出减速直至停止运动的反应。
三、清扫机器人
机器人机身距离地面50cm高度处,安装1台TFmini-S与地面夹角约30°,倾斜探测斜下方1m处的障碍物,当有台阶时,雷达距离会变大,机器人根据雷达数据的变化可以做出减速直至停止运动的反应。
四、巡检机器人
机器人机身距离地面15cm高度处,安装1台TFmini-S与地面夹角约60°,倾斜探测斜下方的障碍物,当有台阶或凹坑时,雷达距离会变大,机器人根据雷达数据的变化可以做出减速直至停止运动的反应。
五、医院搬运机器人
机器人机身距离地面10cm高度处,安装1台TFmini Plus,倾斜探测前方50cm范围内是否有台阶、凹坑等影响机器人行进的物体,当雷达探测到距离发生较大变化时,机器人会做出减速停止的动作,避免整个机器人发生跌倒、损坏等事故。
相关资讯
更多- Layout Designer使用攻略
- 天创机器人成功入选2026年江苏省高质量数据集建设先行先试项目库
- QJAR | 铸启新程,智向未来,钱江机器人上海铸博会首日盛况直击!
- 室外搬运不用愁!蚂蚁机器人方案专家带你读懂无人牵引车
- 爱普拉AGV/AMR充电解决方案,解锁无人化充电难题
- 杭叉集团|风雨如晦 稳创佳绩——一图看懂杭叉集团2026一季度报告
- 磅旗黑科技登陆 CIBF,新能源工厂迈入工业 AI 智能体时代
- 你说我就搬!中力机器人再添猛将:AI 搬运,动口不动手
- 朗誉展讯丨朗誉机器人亮相汉诺威工博会 领跑全球重载智能转运新赛道
- SEMICON SEA 2026 圆满收官|GYRO下一站,韩国ASPS!