欧盟无人驾驶工业车辆新旧标准技术对比解析
转载 2020-07-24 09:37 机器人技术宅 来源: 苏州睿斯博特机器人有限公司
近年来,随着无人驾驶技术在工业车辆领域的广泛应用,欧盟无人驾驶工业车辆的标准EN 1525:1997和EN 1526:1997已经明显无法适用于产品的发展。2020年2月,国际标准化组织(ISO)发布了无人驾驶工业车辆新标准ISO 3691-4:2020,欧盟于同年5月将其转化为欧盟标准EN ISO 3691- 4:2020。
欧盟无人驾驶工业车辆新旧标准技术对比解析:
标准范围
新标准的使用范围明确了无人驾驶工业车辆的常见种类,如自动引导车(AGV)、自动移动机器人、潜伏式机器人等,有利于增强阅读者对使用范围的理解,消除歧义与误用。
同时,新标准对不同操作模式也做出了详细说明,包括操作人员介入的自动模式(比如操作人员的呼叫或给予自动模式的使能操作等)、用于运输一个或多个乘员(非司机或操作人员)的模式、自动模式、附加手控模式(比如附加的有线摇控或无线摇控模式、附加的柄舵操作模式等)、手动操作的维保模式等。
对于标准风险覆盖情况,新标准中明确提出了不包含电源的要求。所以,在标准应用过程中应着重考虑电源(如锂电池、铅酸蓄电池等)的相关安全标准,如EN 62619:2017、EN 60254-1:2005等标准。
电气安全要求
在电气安全要求方面,新标准除了引用EN 1175系列标准并明确所引用的条款之外,还增加了对标准EN 60204-1:2018中适用条款的引用。EN 1175系列标准对于乘驾式车辆的适用性较强,EN 60204-1:2018是机械电气安全的通用标准,在这两套标准中选取适用条款作为引用,极大方便了标准的实施。
制动系统
在制动系统的要求方面,新标准删除了旧标准中对标准ISO 6292的引用,该标准更关注乘驾式车辆的制动性能要求,对于无人驾驶车辆适用性方面的关注度并不高。
新标准中增加了对制动系统的功能安全要求,规定制动系统控制回路的安全等级应达到PLd,这意味着通过主控制器与伺服驱动器联合控制电机的方式很难满足标准要求,由安全PLC输出的安全信号联合驱动器的STO组成的回路更加安全可靠。
稳定性
EN 1525:1997标准中,对于提升负载的高度超过1.8米的车辆要求通过测试来验证,提升高度1.8米及以下的情况可以通过计算来验证。
EN ISO 3691-4:2020在相关方面作了更为明确严格的规定,即:
1. 对于提升负载高度超过500 mm的车辆,要通过倾翻平台测试来验证其稳定性;根据车辆的类型不同,测试标准可在ISO 22915系列标准中进行选择;
2. 对于提升高度小于500 mm的车辆,可从上述标准中选择类型车辆的测试标准进行测试,或者
3. 如果车辆仅在预定空间及场景下使用,且仅执行预定的自动任务时,车辆可以通过计算或110%负载的动态测试来验证其稳定性。
备注:110%负载的动态测试,即加载110%的额定负载,在110%的额定速度(如果最大速度达不到110%的额定速度,选用可达到的最大速度)下运行各种可能的最差工况或组合工况,不应产生倾翻、滑动等不稳定的情况。
在与稳定性相关的功能安全方面,新标准明确的PL的安全等级为c。该等级虽不高,但在实际应用中却非常容易被忽略。因为稳定性并非单独存在的风险,而是与车辆的行驶速度、载荷状态及车辆的转向状态及速度都有直接关系。比如,对于叉车型AGV,在取货或堆货的场景下,存在负载在高处时车辆需要限速行驶的工况,这时候负载高度的信号就成为了关键信号,一旦该信号不可靠(比如负载高度超过300 mm时要限速行驶,但此时检测货物高度的器件给出错误信号,告诉PLC货物的高度小于300 mm),车辆仍会按照额定速度快速行驶,进而导致翻车事故。因此,通常用来检测货物高度的普通型拉线编码器很难达到标准要求,而附加安全型的高位运行开关,成为了通用的解决方案。
人员检测(避障)
旧标准中仅对避障装置的屏蔽 (bypass) 给出了功能安全方面的要求。
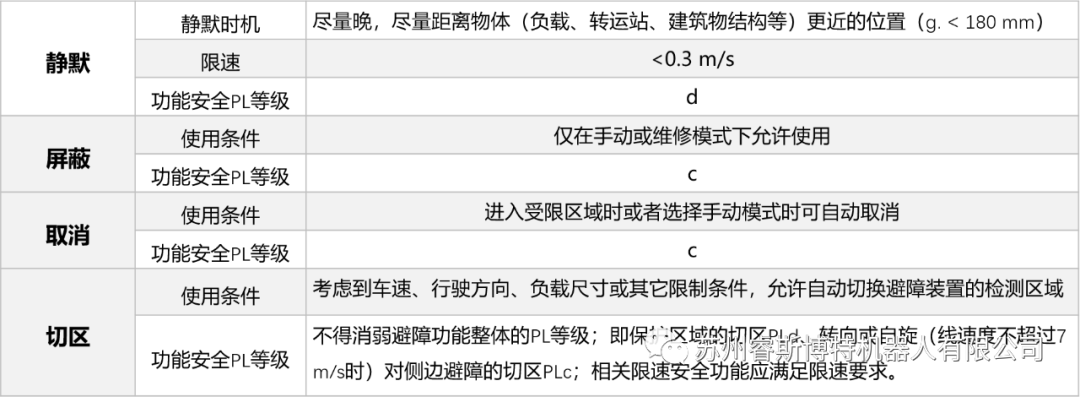
新标准中对避障装置的静默 (muting) 、屏蔽 (override) 、取消 (deactivation) 与切区均作出了明确规定,详情如下:
操作模式
旧标准中仅提及了带操作人员的手动控制与手动步行柄舵控制两种模式下关于保护装置的一些要求;
新标准中除了保留了这些保护装置的要求之外,还增加了操作人员介入的自动模式、带乘员的自动模式以及维保模式下的具体要求。
新标准允许有多种操作模式,并有如下要求:
1. 各个模式之间的切换应通过专用的选择装置(物理或软键);
2. 应能够防止误用或者误触发(可锁的钥匙开关、密码等);
3. 选择某个模式之后,应有额外的确认操作来触发车辆在所选模式下运行;
4. 所选择的模式应清晰地显示出来;
5. 功能安全等级PLc;
操作人员介入的自动模式,或称为半自动模式,即在两个全自动运行任务之间需要操作者手动操作的一种模式;在该模式下:
1. 车辆停在指定的位置等待操作者的操作;
2. 所有的操纵件应为“点 – 动”式;
3. 一旦手动操纵装置被触发,车辆应无法开始自动模式下的下一任务;
4. 手动操纵装置中应有停止车辆所有动作的装置;
5. 操作者触及运动部件的防护;
6. 操作中不允许车辆进行自旋;
7. 下一任务的自动运行应由一确认操作来触发;
带乘员的自动模式,一般用于对车辆进行设置或长距离运输人员的场景下,在该模式下:
1. 车辆在指定位置自动停车;
2. 车辆上的乘员对车辆输入一个确认操作;
3. 应有用于检查乘员是否在指定位置的装置;
4. 当乘员在指定位置时,选择自动模式即可触发该模式;
5. 在乘员的可触及范围内,应有停车装置;
6. 乘员位置应避免危险情况,特别是要考虑车辆的加速及减速,比如提供座椅、安全带等;
7. 应有安全装置将乘员限制在指定位置,比如双手控制装置、脚踏开关或封闭的乘员座舱;
8. 一旦乘员离开指定位置,车辆应自动停车;
9. 乘员位置如果带起升功能,其起升高度不应超过2米;
如果设计了维保模式,在该模式下应满足:
1. 手动操纵装置应为“点 – 动”型,且具备防止误触功能;
2. 手动操装置应位于操作位置处;
3. 避障装置应持续有效,除非有授权人员的有意操作使其失效;
4. 可以有条件地对避障功能进行限制或屏蔽;
5. 除了行驶速度以外,其它动作(货叉升降、传输装置运行等)的速度均应能够被设置;
6. 可以对危险工况进行限制(比如基于货物提升高度的限速、上升限位等);
7. 退出该模式后不应自动触发自动模式。
功能安全
旧标准中对功能安全仅提出了安全回路架构的要求,并且安全功能的描述不够明确。
新标准中明确了几乎所有可能涉及的安全功能,并且针对这些安全功能给出了需要达到的PL等级。主要项目见下表:
| 序号 | 安全功能 | 要求的最低等级PLr | 备注 |
| 1 | 制动系统 | d | |
| 2 | 停车制动系统 | b | |
| 3 | 超速检测系统 | c | |
| 4 | 速度低于0.3 m/s时的速度监控功能 | c | |
| 5 | 直线运动时,电敏避障装置的安全检测区域 | d | 若等级达不到d 应限速到0.3 m/s以下 |
| 6 | 转向或自旋时,电敏避障装置的 安全检测区域(无限速情况) | d | |
| 7 | 转向或自旋时,电敏避障装置的 安全检测区域(限速0..7 m/s以下) | c | |
| 8 | 稳定性 | / | 见14 |
| 9 | 自动充电系统下充电口的断电 | b | 充电口在物理防护撤离 之前断电、充电口在车 辆运行之前断电 |
| 10 | 货物到位检测 | b | |
| 11 | 承载装置的位置与动作 | b | |
| 12 | 与第14项的稳定性相关 | / | |
| 13 | 与第14项的稳定性相关 | / | |
| 14 | 避免因速度、转向及负载造成的失稳 | c | |
| 15 | 急停 | d | |
| 16 | 人员检测(避障):行驶方向 | d | |
| 17 | 人员检测(避障):间隙不足工况 | d | 保证最低 180 mm距离的检测 |
| 18 | 手动模式或维保模式下对避障功能的屏蔽 | c | |
| 19 | 避障功能的静默 | d | |
| 20 | 叉尖防撞 | d | |
| 21 | 避障装置的切区 | d | |
| 22 | 转向或自旋时,避障装置的切区 (限速0..7 m/s以下) | c | |
| 23 | 乘员检测 | d | |
| 24 | "点 - 动"功能 | c | |
| 25 | 人员到达操作位置时自动解除自动功能 | c | |
| 26 | 手动模式 | / | |
| 27 | 自动模式下柄舵的位置 | c | |
| 28 | 声、光报警 | a | |
| 29 | 防止进入限定区域的外围防护装置 | d |
电磁兼容
旧标准中不包含电磁兼容的要求,新标准中明确引用了工业车辆的电磁兼容标准EN 12895。
带输送装置的车辆
新标准中明确了带输送装置的车辆相关要求。如果车辆上带有输送装置,应满足如下要求:
1. 在车辆行驶之前,输送装置先停止动作;
2. 车辆上的急停应同时停止输送装置的动作;
3. 有措施保证负载在正确位置;
4. 辊式输送机或链条机应提供侧边防护;
5. 传送带的危险点应有固定式防护装置或防夹手装置;
测试与验证
新标准中明确了避障测试的测试条件与要求;
1. 障碍物A和B的表面反光率2% - 6%;吸光度22(比如黑色);
2. 在最差工况下进行测试;
3. 加载110%额定载荷,以最大速度运行;
4. 在多区域进行测试;
稳定性测试的要求变化见上文第4条;
增加了结构强度测试;车辆在水平地面上,加载125%额定载荷,保持15分钟,车辆应无肉眼可见的变形或破坏。
警示系统
旧标准中规定触发避障后撤离障碍,车辆即可在一定警示信号条件下自动恢复运行;新标准中对这一场景增加了撤离时间界限,即如果触发避障后10秒内撤离障碍,车辆可无条件自动恢复原运行状态。
另外,新标准中还明确的声、光警示信号的选择依据,即根据使用现场的噪音、照明及亮度情况进行选用合适的警示信号。
其它
新标准在说明书、警示标识及铭牌上均对旧标准作出了修订或补充,由于不涉及技术内容,这里不再赘述。
相关资讯
更多- 美国空军基地部署电动移动电源站,叉车与剪叉作业走向“设备+储能”一体化
- 中国AGV网上周热点回顾(2026年6月15日-6月20日)
- 中国AGV网上周热点回顾(2026年6月8日-6月13日)
- AGILOX × 上交会 | 6.11-13
- 中国AGV网上周热点回顾(2026年6月1日-6月6日)
- “一带一路 出海向新丨中叉网/AGV网2026亚欧大陆万里行” 圆满收官
- 第三届中国工业车辆和移动机器人“金力奖”颁奖盛典圆满落幕
- 中国AGV网上周热点回顾(2026年5月25日-5月30日)
- 中叉网/AGV网网将再度亮相LET 2026,共筑智慧物流新未来
- 中国AGV网上周热点回顾(2026年5月18日-5月23日)