浙江大学熊蓉教授团队受邀出席2021CAIRDC并做智能移动机器人技术与应用主题演讲
转载 2021-04-06 09:22 迦智机器人 来源:迦智机器人
2021年3月26-27日中国人工智能和机器人领域开发者的年度盛会——中国人工智能与机器人开发者大会(CAIRDC)在上海举行,大会主题为“创新驱动发展,科技引领未来”,1300多名国内外专家、政企代表汇集。大会由中共上海市科学技术工作委员会、上海市经济和信息化委员会和上海市松江区人民政府指导,上海市松江区洞泾镇人民政府、睿慕课和G60科创走廊AI产业联盟联合主办。

浙江大学熊蓉教授
受邀出席并做主题报告
浙江大学教授、博士生导师,国家科技部智能机器人专家组专家,浙江大学智能系统与控制研究所机器人实验室主任,迦智科技创始人熊蓉女士受邀参会,并做《智能移动机器人技术与应用》的主题演讲。

浙江大学熊蓉教授团队从2000年开始从事智能移动机器人相关的技术研究工作,主要研究方向为智能感知和运动控制。会议期间,熊蓉教授向各位与会嘉宾分享了团队近几年最新技术研究和应用成果,并与各与会专家和代表就中国机器人产业发展的趋势和未来前景,进行了诚挚交流和圆桌讨论。
熊蓉教授报告全文内容精选
移动是机器人的重要基础功能,可以帮助我们搬运重物,也能够到达人类难以达到或者危险的环境进行探测、搜索、救援等系列工作;移动和操作结合,可以有效扩大作业臂的作业范围,从而实现大型部件的加工、在车间的移动作业等。近年来,移动机器人的应用领域不断扩展,从规模化应用较多的生产制造、电商物流、家庭清洁、港口码头、变电站巡检、安防特种等领域,到农业、林业、建筑、科考探测、地质救援、消防等领域。

在很多领域,移动机器人并不像我们所期待的那样实现大规模应用的原因,从技术角度来说,我们发现这些应用环境各式各样,地形地貌各不同,有空中、水下、不平整地面、存在各种动态变化等,如何让机器人在复杂环境中实现长期鲁棒的自主移动,是技术层面面临的一个主要挑战。这个挑战需要解决两个核心的难点问题,一个是移动方式,这决定了机器人是否能适应在这样的复杂环境下灵巧运动的问题;另一个是导航方式,主要回答在哪里、到哪里和怎么去的关键问题,这决定了机器人的智能性,是否能适应各种环境以及环境里的动态变化,摆脱人的遥控等实现自主移动的主要问题。

从移动的方式来讲,陆地上有多种的移动方式,轮式、履带式、躯干式等,其中腿足式可以说是地面运动方式里最具灵活性和地形适应性的移动方式,它不仅可以适应不平整的地面,也可以适应不连续的地形,是机器人研究领域的重要课题,需要解决难建模、易失稳、能耗高等诸多挑战性难题。浙大自2006年关注仿人机器人的挑战,并开展一系列这方面的研究,2008-2011年在国家863重点课题的支持下,开发了两个大型仿人机器人,身高165,重56公斤,全身有30个自由度,可以跟人或双机器人进行乒乓球对打,跟人最大回合数是有145个回合,双机器人也有140多个回合,可以去适应不同的球速,包括对快速旋转飞行乒乓球的准确识别、定位和轨迹的预测,以及实时在线的全身协调运动规划、手臂快速运动下的平衡控制等,该成果得到了美联社、路透社、国家地理频道等专题报道,美国自然科学基金会把该项成果做长篇幅介绍并写进给奥巴马政府的工作报告内。但当时机器人的行走速度只有1.2公里/小时,难以适应打球的快速度。

从2012年开始,我们主要围绕着如何提高机器人运行速度,以及如何从室内走向室外,去适应室外不平整的地面来开展研究。我们通过在关节柔顺控制、全身协调控制、未知外力扰动下的柔顺平衡控制等技术突破,成功研制在室外可以适应草地钢管等不平整地面、以及适应未知外力推动的双足仿人机器人,行走速度最快可以达到4.5公里/小时。利用相关技术,“绝影”机器人由我们团队毕业的学生进行了创业,打造了四足机器人“绝影”。这个机器人具有多种步态,并能完成跳跃、上下30°的斜坡、适应不平整地面、适应各种外力的扰动,目前在变电站巡检等方面进行推广应用。

除了这样大型的腿足式机器人,我们团队新引进的研究员陆博士,他的研究方向是在人体内进行送药的机器人,把微型、软体和多足结合起来。应用腿足对不平整应用环境的适应性,来适应人体器官内的不平整性。利用微纳加工的技术,来给机器人安装了数以百计的、非常柔软纤细的腿,加上磁性的物质来实现在磁场控制下的机器人运动,实现了多种步态,包括波形拍打式步态与摇摆切换式步态。它可以灵活适应人体内的不平整及液态等复杂环境,携带药物精确送达病变处,该微型多足软体机器人自重只有4克,但能够搬运42克的药丸,搬运重量是自身重量的几十倍,搬运的速度和重量都达到了一个很高的指标,并在模拟的人体胃环境里做了实验,获得了2018年中国十大学术进展奖。

从导航方式来讲,它决定了机器人在环境中的自主能力,我们需要解决三个方面的问题,一是要构建环境的地图,然后根据机器人当前的感知,在地图上确定机器人的位置,也就是解决在哪里这个问题,然后根据要到哪里来实现,通过导航规划来解决怎么去这个问题。由于这几个问题的复杂性,特别是地图构建和定位问题的复杂性,所以业内之前的移动机器人虽然也能够实现自主移动,实际上是在技术方面做了简化,比如RGV是用了轨道导引,AGV是用了磁钉、磁条、二维码这样的标识去减少定位难题,通过传感器对这些标识的检测,来完成定位;另外我们的家庭清洁作业机器人也是自主导航,但降低了对效率和定位精度的要求。但现在,很多像工业领域、港口码头等领域,对如何摆脱这些人工标识物、实现高可靠高精度的自然导航提出了重要需求。目前我们已经通过一些技术突破推动了在这些领域中的应用。

地图构建问题在95年就被定义了,由于定位和地图构建形成了一个鸡与蛋的问题,被称为一个难的问题。2001年研究人员用扩展卡曼滤波,在数据关联准确的情况下,可以进行一致性求解。2007年提出的粒子滤波方法,使得我们能够对数据关联做多种假设,来容忍可能的数据关联错误。2006至2011年,研究人员提出了图优化方法,通过构建图模型、建立节点之间的位置约束和观测约束,通过形成约束最大一致性来求解问题;并通过形成图优化问题的求解工具,来实现大规模最优问题的快速求解。在这个框架下,我们也做了一系列工作,特别是如何正确建立节点与节点之间的数据关联。我们做的主要工作包括,怎么对三维的点云进行快速匹配,怎么在大范围的环境建立对点云的描述,能够快速检索到我们又回到了这个位置,从而实现正确的位置识别。同时近几年我们还研究了面向像腿足式机器人,它要用到的不是激光地图,也不是视觉特征地图,而是稠密的高度地图,这样的地图构建会涉及大量的计算,而且我们现在一致性地图的构建主要面向的是稀疏特征的地图一致性构建,那我们要怎样去解决这个问题,来实现大范围一致的稠密高层地图的构建。
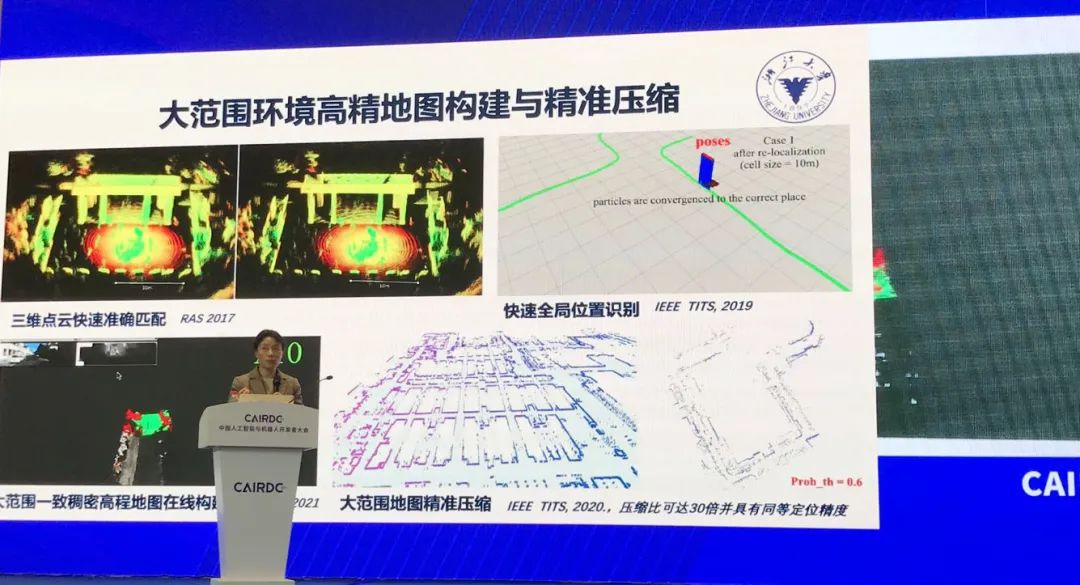
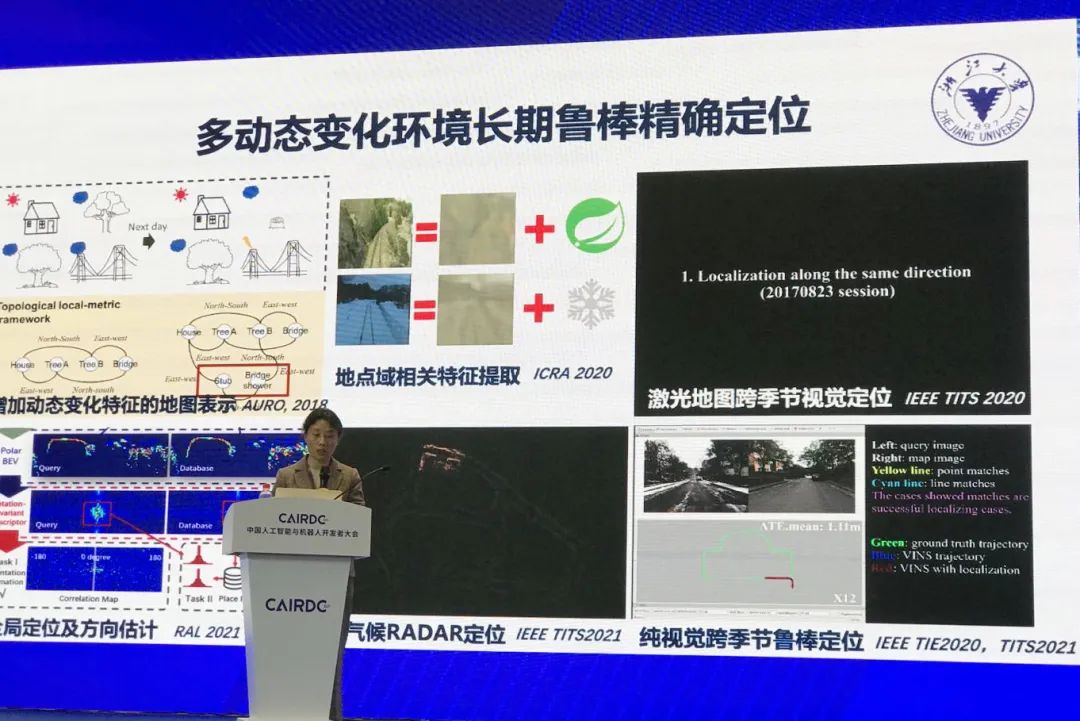
还有一个工作,在我们建立的大范围地图内,还要能够满足高精度定位的要求,大范围、高精度伴随的数据量非常大,在工业、航空航天等应用中,机器人能够带的计算设备往往是有限的,特别是像航空航天方面,就是486的水平,那么这样大的数据量对存储和计算都提出了很高要求,我们在这里做的就是怎么去对地图做精准的压缩,做到了可以压缩30倍,同时还能达到同样的定位精度。在地图构建的基础上,第二个关键问题就是定位。定位也是有多种的技术途径,在室外像无人驾驶等很多在用的是GPS,但是在室内包括在园区、绿化建筑物比较密集的地方,GPS的信号是非常不稳定的,室内根本是没法使用的,所以在室内应用中,一般用的是磁钉、磁条、二维码标识的方法。对于自然导航来讲,我们要去解决的就是当前环境感知发生变化时,怎么去找到环境和地图之间的正确匹配。特别是如果是用视觉的话,会面临季节性变化,气候变化等,雪前雪后的图像是完全不一样的。我们近几年的工作就主要围绕着怎么去适应环境的动态变化,特别是这种长周期的、季节性的、气候性的变化,来实现在环境中的长期鲁棒精确定位。我们提出了新的地图表示方式,当环境变化的时候,解决把新的环境特征如何加入到地图里,使得它下次能够被使用来进行定位,从而避免光照、气候、季节变化带来的纹理上的影响;同时我们解决了异构传感器信息匹配问题,可以在激光地图里进行视觉定位,能适应春天构建的地图,夏天、秋天、冬天,特别是冬天雪后图像发生极大变化,也能正确定位;也解决了纯视觉定位,即在视觉特征地图中进行视觉定位,实现了在大雪前后存在大概90%的错误视觉特征匹配的情况下,机器人也能鲁棒估计定位的结果。
在导航规划方面,已经有了丰富的研究成果,形成了经典的导航规划方法,在工业等领域发挥了很大作用。但是传统的方法,在环境适应性方面、人机共融方面,都有很多的局限性,同时强依赖于前面所讲到的定位,如果定位准确性不高的话,也将直接影响到导航规划的结果。近几年我们从如何去模拟人的角度上来进行导航规划及行为决策上的研究。一个工作是能否学习人的行为,人在驾驶车时依靠手机APP的粗定位以及告诉你是前进、左转、右转的粗规划,就能够根据眼前的场景,来实现安全的驾驶。我们利用行车记录仪的数据,利用他的行车轨迹,对视觉图像进行自动的标注,然后利用所提出的神经网络方法实现了同样的效果,在我们的校园环境中进行试验,即使是到一个新的环境里,机器人靠这样的粗定位和粗规划,也能够实现安全的驾驶,并且能够适应环境中动态移动的障碍物。同时我们也在无人驾驶加速、减速、变道等行为决策,以及如何学习人的社交性规则进行导航规划方面,做了一些工作。目前我们一些技术已经在实际应用场景中实现了验证,包括我们2017年和京东联合发布的618校园送货机器人,我们是唯一一台不依赖于GPS定位,在校园里可长周期自主移动的机器人,也用到了奇瑞的园区自动停车方面,园区内GPS信号非常不稳定,通过我们的技术实现了平滑的准确定位,也实现了从室外到地下车库的自动驾驶,同时在双足、四足机器人上均有应用。

我们也实现了产业的应用,孵化了迦智科技,提供面向智能制造行业自然导航搬运机器人,依靠自身的感知实现定位导航,可以有效适应像半导体、电子制造工厂的柔性制造需求,应用在中兴通讯、中车、天马等3C、半导体企业的工厂里,最近在两会期间的CCTV-2报道里也出现了我们机器人的身影。

在园区级中低速重载无人驾驶的应用方面,我们的定位精度和对精度都达到了国际领先水平,实现了室内室外的通用,不依赖于GPS,在园区环境里实现长期运行,目前已经在几个单位运行了1年多,经历了雨雪等各种气候以及高磁环境的考验。

目前,我们也在做一些新的研究,一个是异构的多机器人协同,结合5G实现的大带宽通信,我们可以有更加丰富的信息交互,如何融合5G进行多机器人的规划、多机器人的信息交融等,我们也做到了通过空中机器人图像来实现地面机器人的定位。

针对机器人操作学习方面,我们也进行了一些攻关。包括在动作上如何进行拟人化的学习,利用我们所提出的机器人学习方法,实现YUMI机器人学习人的手语动作,并保障机器人动作的流畅性、仿人性和安全性。我们之前做的是对乒乓球这样一个快速飞行球的识别和轨迹预测,在现实中还有很多物体是不均匀的、是异形的,我们很难去对每一个都建立准确的模型,然后来进行观测、预测,在这里我们也是设计了新的神经网络,并且实现从一个物体的学习迁移到不同物体上面。目前做到了准确预测位置,下一步还要做到去预测它的姿态,来能够实现抓取,我们也从对物体的抓取拓展到抓推等多种动作的融合上,从而适应更为复杂的场景。

另外,我们也研究了任务级的操作学习。通过识别操作人员是用了什么样的动作、操作了什么样的物体,达到了怎么样的装配效果,部件之间的装配关系和装配的精度要求,来生成机器人的程序,可以实现避免人工对作业的编程,而是用演示的方式自动生成相关的程序。

同时,我们也在把移动和操作结合起来,并且考虑人机的协同。通过人稍微施一点点力,机器人能够感知人的搬运意图,跟人来形成协作,以及在协同搬运的过程中,实现协同、避障、搬运等更为复杂的多级任务。
熊蓉教授研究团队成员
王 越副教授 研究方向:自主移动、无人驾驶
朱秋国博士 研究方向:腿足机器人陆豪健百人计划研究员研究方向:微型软体机器人、医疗机器人

相关资讯
更多- 前滩中心|YOGO 机器人赋能商务工作圈,构建高效智能配送生态
- 深化产学研融合,共育国际化人才——深圳理工大学校长樊建平一行到访普渡机器人
- 仙工智能作为战略合作伙伴参与香港具身智能建设,助力科研成果加速落地
- 十数载磨剑突围垄断,镭神智能:以百分百国产化,铸就中国激光雷达硬核底气
- 天能锂电2026年度榜样共赢商及品牌战略全球发布盛典在京举行
- 喜报!诺力荣获浙江省首席质量官质量变革创新典型案例一等奖
- 案例 | 硬核落地!AiTEN x 中天科技,解锁钢卷跨层无人搬运新模式
- 航宇智造与库卡机器人签署战略合作协议,共推高端制造与工业机器人深度融合
- 品质驱动,智赋未来 | 三一机器人欧洲经销商及大客户峰会暨答谢晚宴圆满举行
- 天能与柯锐世开展战略合作 深化绿色循环产业协同发展