3D相机和传感器的创新使自主移动机器人技术不断进步
原创 2021-12-01 10:29 DDing 来源:AGV网
与自动化领域的其他几项激动人心的技术一样,自主移动机器人(AMR)在仓库、配送中心和工厂等地方继续获得青睐。随着AMR市场的持续增长,使这些机器人能够在具有挑战性的环境中航行的技术也必须进步。本文将深入探讨一些最新的技术,使AMR能够导航,避免障碍物和碰撞,并在工厂车间与人一起工作。
非结构化的、具有挑战性的环境
今天,机器人比以往任何时候都更多地在制造、交付和安全等领域处理大量的非传统角色。移动机器人在穿越不断变化和非结构化的环境时面临挑战,必须被设计成能够在适当的决策和安全、有效的导航范围内检测和分类物体。美国Velodyne激光雷达公司软件工程副总裁Vishal Jain说,AMR需要能够支持机器人识别和区分不同运动、形状、反射率和材料组成的物体的感知数据。
激光雷达技术,如Velodyne Lidar公司提供的产品,可以让不同类型的机器人在不同的环境中工作,利用丰富而准确的3D信息进行高速安全的导航,避免与小物体(如干草)、悬空物体(如电缆或灯具)和移动障碍物(如人)发生碰撞,有充足的时间进行安全导航。Velodyne传感器收集的高分辨率和密集的三维感知数据实现了所有这些--定位、绘图、物体分类和物体跟踪。
例如,该公司新的Velarray M1600固态激光雷达传感器为AMR提供了高达30米的实时近场感知数据和32度的宽广垂直视野,使他们能够穿越非结构化和变化的环境。
Jain说:"M1600固态激光雷达传感器采用Velodyne专有的微型激光雷达阵列架构,该架构采用公司的光学芯片技术,有8个激光雷达通道,微型化到1分钱大小,构成激光雷达传感器的'引擎。这种小型化与Velodyne专有的全自动制造工艺相结合,可以实现低成本、高质量的大规模生产。"
安全标准的考虑
在机器人安全方面,几乎没有任何标准方面的指导,直到最近RIA(国际机器人工业协会)推出了第一个工业移动机器人国家安全标准。ANSI/RIA R15.08-1-2020 - 美国工业移动机器人国家标准- 安全要求- 第1部分。对工业移动机器人的要求为工业移动机器人的设计提供了技术要求,以支持在机器人附近工作的人的安全。德国工业传感器公司SICK的市场产品经理Aaron Rothmeyer认为这将导致机器人部署的增加。
Rothmeyer说:"RIA的R15.08确实可以为更广泛的采用打开局面,因为那些对部署机器人犹豫不决的公司现在有了标准化的安全准则可以遵循,可以放心了。
在参与了该标准的制定后,SICK现在使用这些准则来创造符合规定的产品。
"许多用于移动机器人的设备越来越小,越来越轻,所以我们看了新的标准和市场的发展方向,并开始发布更多的小型、低成本、轻量级的产品,可以装入更小的平台。"Rothmeyer说。
例如,SICK的nanoScan3安全激光扫描仪或其TIM781二维激光雷达传感器,它也有一个安全变体。据Rothmeyer说,该产品的尺寸约为3乘2英寸,可以放入小空间。此外,TIM781传感器在IEC安全标准方面为移动机器人的世界提供了新的可能性。
Rothmeyer说:"外面的大多数安全激光扫描仪的性能都是D级,这基本上是为了防止最高级别的风险,即你有一台机器有可能在工厂车间杀死人。有了TIM781,我们已经能够从以前的传感器中吸取一些经验,并考虑到RIA 15.08准则,做一些以前从未做过的事情,即在B级保护低风险的应用。"
B级代表了与D级截然不同的类别,通常为不太严重的伤害提供辅助性保护。例如,如果具有D级性能的自动导引车(AGV)拉着一辆拖车,而拖车在转弯时产生了一个夹点,该夹点代表B级应用。有人可能在夹点处受伤,但没有死亡的风险。
三维飞行时间
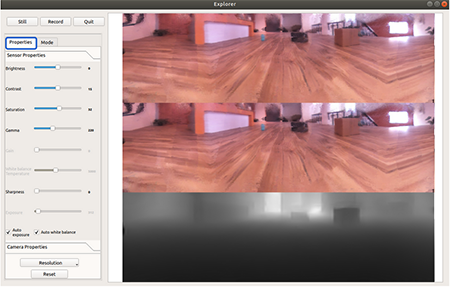
另一项常用于AMR的技术是3D飞行时间(ToF)。德国Basler等公司提供ToF解决方案,如blaze-101相机,它提供了高达10米的大测量范围和高达30 fps的帧率。据Basler公司三维图像采集产品经理Martin Gramatke说,这种相机可以帮助机器人在具有不同表面和不同环境光线的挑战性环境中进行导航和避免碰撞。
他说:"在扫描平面低于障碍物的情况下,激光扫描仪可能会错过一个物体,如另一辆叉车的货叉,ToF相机可以帮助防止机器损坏。
然而,Gramatke并不认为仅靠ToF相机就能解决这个问题。
他认为,可靠的导航和障碍物检测的关键是不同传感器的组合。例如,我们提供的软件可以将彩色图像数据投射到ToF相机的3D图像数据上。然后,人工智能可以对颜色数据进行分类,以便在导航和障碍物探测方面做出更好的决定。
自2018年在斯图加特国际视觉展览会上推出Helios2 3D ToF相机以来,LUCID视觉实验室一直在收集市场反馈,并在现实世界的应用中获得了行业专业知识,使他们能够实现AMR客户所寻求的功能- 包括多通道功能。使用传统的ToF方法,如果两个或更多的AMR来到一个交叉点,ToF解决方案发出的光会相互干扰。有了多通道功能,多个ToF相机可以同时对同一空间进行成像,而不会干扰彼此的深度数据。
瑞士工业视觉产品制造商-LUCID视觉实验室的创始人兼总裁Rod Barman说:"我们还选择以索尼推荐的850纳米波长实现我们的Helios相机,这很好地解决了室内AMR市场。在这个范围内,传感器的量子效率是940纳米的两倍,为客户提供了亚毫米级精度的特殊三维深度数据,实现了卓越的点云和未经过滤的数据。“
他补充说,AMR在一些恶劣的环境中工作,因此我们设计的下一代Helios2相机能够承受这些严酷的环境。Helios2在60x60x77.5毫米的紧凑外形中提供了"工厂坚硬"的IP67保护,GigE Vision PoE和工业M12连接器的电缆长度可达100米。我们的测试符合DIN EN 60068-2-27、DIN EN 60068-2-64冲击和振动标准,以及DIN EN 61000-6-2工业电磁兼容性标准。
360度的三维数据
美国DreamVu公司的PAL系列3D视觉系统专门设计用于机器人,提供360度的3D视觉。据DreamVu公司首席执行官Mark Davidson说,许多客户表示,他们最大的一些AMR导航挑战在于必须考虑的环境状况的广泛性。在大型仓库中,定位等任务可能被证明是困难的,但该公司的3D视觉系统已经解决了这些挑战。
该公司通过不断改进其软件版本中的算法,从每一次部署中学习更多的知识,并将这些知识带入下一次部署中,最后,通过与客户采取极其合作的方式来做到这一点。
他说:"我们花了很多时间,工程师与工程师之间,通过缩放电话来回传递资产,并从我们的客户那里得到反馈,了解他们在特定应用中需要什么。"例如,语义分割,是我们花了很多时间的事情。我们继续推进这些算法,并在研发方面投入大量的资金。"
在最近的一个例子中,DreamVu帮助一个客户处理了地面上的导航和避障问题。这家机器人导航公司的终端客户向市场推出了一款洗地机,在识别地板上的物体方面遇到了挑战。该公司的工程副总裁测试了10个不同的传感器来解决这个问题,但没有一个能应对这个挑战。在测试中,传感器识别了灰色地板上的白色胶带和所有类型地板上的黑色胶带--这两者都不是障碍物,因为胶带没有高度。在大约两周的时间里,DreamVu通过研发努力为客户解决了这个问题。
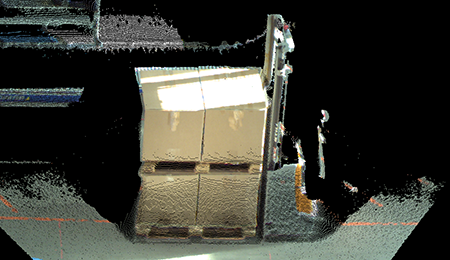
DreamVu基于摄像头的系统使用专利的光学和成像软件,提供360°×110°的RGB-D视场--完整的色彩和深度。据Davidson说,很少有软件能够利用360度的数据,所以DreamVu创建了他们自己的视觉智能软件,以利用他们的摄像机。许多移动机器人在一个平面上使用二维激光雷达,例如,可以探测到躺在地上的人,但在该平面以下或以上的任何东西都会被光线错过。有了DreamVu的3D障碍物探测能力,机器人可以看到下面的地板,也可以看到上面的机器人。
相关资讯
更多- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT
- IMS Gear | 亿迈齿轮CMEF 2026邀请函
- 4月展会预告 | 安德普邀您相聚美国亚特兰大国际物流展览会(4.13- 4.16)& 德国汉诺威工业博览会(4.20-4.24)
- 浙报集团社长姜军一行调研蓝芯机器人:看3D视觉与AI大模型如何重塑智造
- 益佳品质 通行天下--中叉网专访益佳通新能源
- 邀请函 | 擎朗清洁爆品即将亮相荷兰Interclean清洁展!
- 能力升级 | 高密度存储玩家+1
- 未来工厂什么样?“电子电路展”与“先进制造论坛”,库卡给出答案!