1+1>2|3D激光SLAM+GNSS RTK室外高精定位融合方案
转载 2024-06-13 10:07 浙江科聪 来源:浙江科聪

在室外移动机器人的应用场景中,精确的定位能力不仅构成了其自主导航的核心,而且对于确保其操作的安全性和可靠性至关重要。当前,室外高精度定位技术的两大主流方案分别是3D激光同时定位与地图构建(SLAM)和全球导航卫星系统实时动态定位(GNSS RTK)。然而,依赖单一传感器的定位系统往往会因环境条件的变化和信号干扰而受到限制,这种局限性在面对日益增长的复杂应用需求时显得尤为明显,难以满足广泛的使用场景。因此,为了实现更为稳健和可靠的室外定位,探索多传感器融合技术成为了行业发展的新趋势。
3D激光雷达定位方案
在室内或有一定环境特征的室外,可以获得高精度、高鲁棒性的定位。但在空旷的室外,缺乏环境特征,难以精确地定位。
GNSS RTK 定位方案
在空旷室外环境下,可以获得有效的定位,且具有全局一致性,没有积累误差。但在室外高楼遮挡的地方无法获得持续、准确的定位信息。
在集成IMU和轮速计等传感器的基础上,科聪推出3D激光SLAM与GNSS RTK融合定位方案,通过两种技术的优势互补,极大提升了定位精度和定位稳定性。
科聪融合定位方案
KC Integrated Positioning Solution
关键技术挑战
坐标转换难题:3D激光SLAM采用的是局部坐标系统,GNSS采用是全局坐标系统,实现定位数据融合的前提是建立两者坐标系之间的转换关系,由于两者传感器数据均存在一定测量误差和测量时滞,因此精确计算其坐标系转换复杂性高。
回环匹配困难:空旷室外场景下,GNSS信号缺乏精确的高程信息使得准确三维回环匹配实施难度大。
科聪应对策略
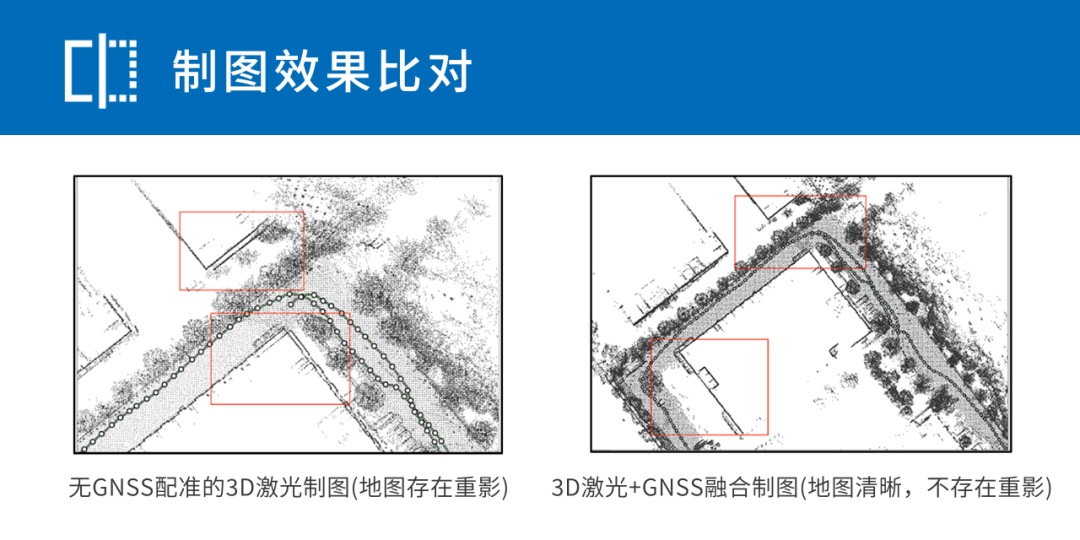
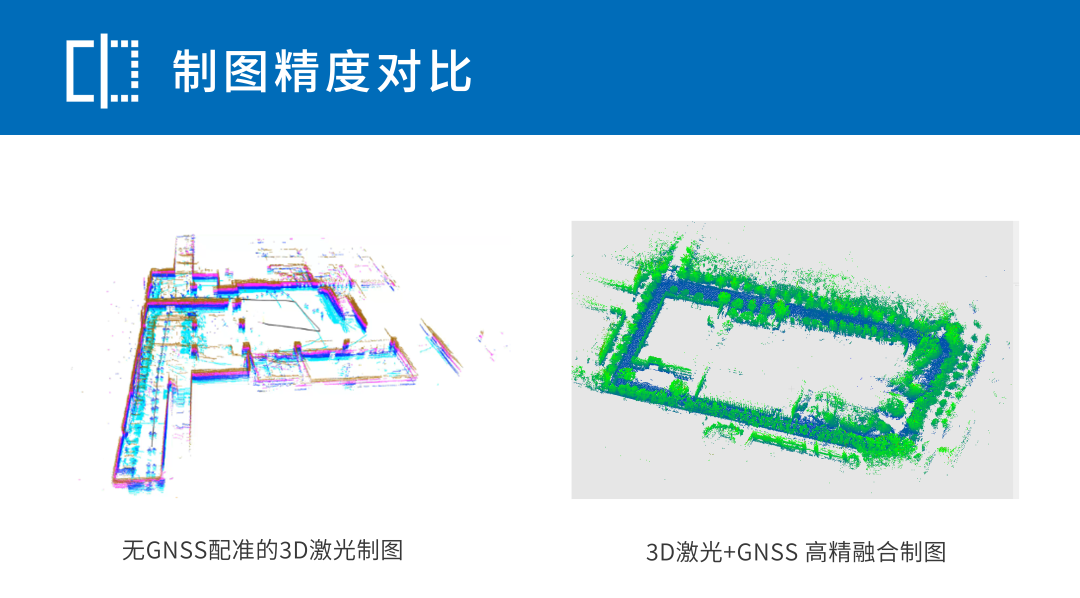
在制图阶段,使用部分GNSS数据和激光定位数据计算原点数值。随后不断地将激光数据和GNSS数据与已有的地图进行配准,将配准结果加入到非线性优化模型中,推导模型的损失函数(Loss Function),在一定约束内寻找最小值,完成最优处理,得到3D激光SLAM和GNSS RTK融合地图。
定位过程中,根据获取到的激光数据或GNSS定位位姿,与已创建好的地图进行对比匹配。与传统的3D激光定位技术相比,科聪的融合定位方案在空旷环境中表现出色,将定位精度从±5cm显著提升至±1cm。并且使机器人在5毫秒至10毫秒内,迅速获得实时且精确的定位信息。
通过无切换耦合、全局一致性等特性,科聪的融合定位方案显著提升了室外定位表现。无论是在何种复杂环境中,该方案都能够保证高精度定位输出。

相关资讯
更多- 高承载・高精准・高安全|欧米麦克为制造业 “降三高” 而来
- 智赴濠江,链接全球|嘉腾机器人受邀亮相顺澳经贸展
- 天能发布10余款新品,固态和氢燃料电池签署多个战略合作
- Cascade-KOOI 液压式前移叉--助您拓展叉车的作业范围
- 牧星智能 LogiMAT 2026 完美收官 | 全流程自动化再树标杆
- 合肥搬易通(MiMA米玛)站驾式三向叉车 MC12:为服装制造行业构建高效密集型仓储,超窄通道叉车当然选MiMA!
- 【重磅喜讯】镭神智能斩获吴文俊人工智能科技进步奖一等奖!
- 迦智科技出海记| 三月韩、泰、印三国工业展会圆满收官
- AGILOX 亮相中奥(常州)创新中心
- 智领欧洲,底座先行丨仙工智能(SEER)四度闪耀德国 LogiMAT