从专利技术看AGV的研究热点
转载 2017-05-11 09:03 艾吉威 来源:艾吉威
AGV 主要由导向模块、行走模块、控制模块、通讯装置、移载装置和蓄电池等构成,其中,导向模块和控制模块是AGV的关键模块。AGV技术最早出现在美国,著名的福特汽车公司是AGV应用的先驱,在1913年时就采用有轨引导的AGV代替输送机在汽车底盘装配线上应用。那时候的AGV并不属于自动导引小车,而是需要借助轨道,在特定的路径上作业,与现在应用的自主导引AGV存在很大的差异。1953年美国公司设计了第一台电磁导引的AGV,虽然这时候AGV的专利还很少,但从此开启了AGV导航技术的研究热点。
20世纪80年代以来开启了AGV技术研究的一个小高峰,主要是因为无线导引技术被引入到AGV系统中,其中影响最大最典型的是激光导引。激光导引的引入,使AGV在灵活性和精准度上取得巨大的进步。之后21世纪初AGV的技术研究进入瓶颈期,这时期的AGV专利申请量呈下滑趋势,急需攻克的技术难题是灵活性和大型调度系统的集成实用。2010年后AGV迎来了另一个发展高峰,这得益于大型服务器、数据处理器的开发和新型导引方式的应用,如无反射板激光自主导航技术,使得AGV更加智能且模块化。
AGV的专利申请量主要集中在日本、美国、欧洲、韩国、中国等国家,日本通过对复杂AGV简化研究,转化为AGC,在专利申请量上超越AGV发源国美国,排名第一。中国引入AGV的时间比较晚,但有后来居上的趋势,AGV申请量排名仅次于日本,占据第二位。国内的专利申请人主要集中在高校和中小企业,其中高校申请人如苏州工业园区职业技术学院、南京航空航天大学、合肥工业大学等。中小企业申请人中,艾吉威机器人有限公司所占比重较大,2014年后最新申请量排名全国第一,且申请质量较高,发明专利较多,包括无反射板激光自主导航技术的发明专利。
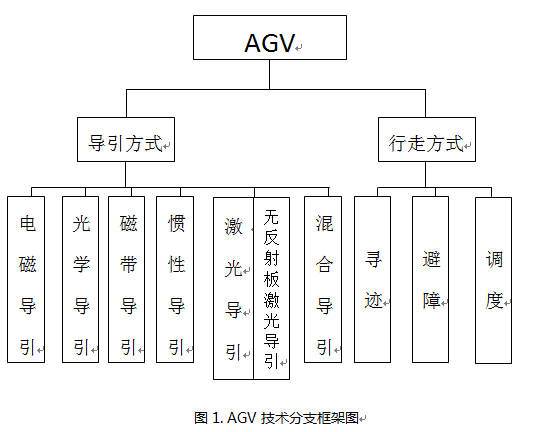
通过对AGV 相关专利文献的标引,发现专利申请侧重领域很多,其核心包括改善导航方式研究(根据具体的应用环境选取特定的导引方式,或者采用多种导引方式结合的方式取长补短以达到较好的综合效果),AGV 自身定位精度、控制系统和路径规划方法,如通过改进导引设备自身以提高定位精度、集成控制系统的设计、路径规划方法的选择为实现AGV的精确定位。
综上所述,AGV 随着计算机技术和智能控制策略的发展,开始走向集成化和智能化,主要关注点为AGV 自身定位的精准性和行走方式的控制,且涉及核心技术的申请量主要集中在欧美日韩等国家,我国在AGV 方面起步较晚,未来应集中精力改进导航方式、控制方式以及AGV结构上,在AGV知识产权上争取更多的话语权。
相关资讯
更多- 中国AGV网上周热点回顾(2026年6月1日-6月6日)
- “一带一路 出海向新丨中叉网/AGV网2026亚欧大陆万里行” 圆满收官
- 第三届中国工业车辆和移动机器人“金力奖”颁奖盛典圆满落幕
- 中国AGV网上周热点回顾(2026年5月25日-5月30日)
- 中叉网/AGV网网将再度亮相LET 2026,共筑智慧物流新未来
- 中国AGV网上周热点回顾(2026年5月18日-5月23日)
- 中国AGV网上周热点回顾(2026年5月11日-5月16日)
- 中国AGV网上周热点回顾(2026年4月27日-5月2日)
- 中力股份2025年报:加码数智移动机器人,经营稳进与战略定力并显
- 中国AGV网上周热点回顾(2026年4月20日-4月25日)