AGV设计关键--差速式驱动的电机参数
转载 2018-03-20 07:16 兴颂科技 来源: 兴颂科技上一期我们聊到AGV的动力电机有三大类型,分别是直流有刷电机、直流无刷电机和交流异步电机。AGV的驱动方式也分三种:差速驱动型、舵轮驱动型和全向型(采用麦克纳姆轮)。
差速驱动型:

舵轮驱动型:

麦克纳姆轮:

然而,利用直流无刷电机组成差速驱动型为目前小型AGV(1T以下负载)普遍采用的驱动方式,下面我们详细聊聊差速式驱动的设计。
对于设计AGV来说,如何选型适合的电机与驱动器至关重要!那如何能够恰到好处的选择电机的功率和匹配的减速机呢?
如果选择的电机和减速机提供的最大扭矩小于克服负载所产生的摩擦力,那么电机将持续处于过载状态,电机可能不会立即出现故障或损坏,但时间久了就会烧坏电机和使减速机内部齿轮受损(永久性损坏减速机)和烧坏驱动器;
如果选择电机的减速机提供的最大扭矩大于克服负载所产生的摩擦力,那电机输出过多的功率未能充分充分利用,造成AGV续航下降,造成不必要的浪费,成本随之增加。
所以如何选择合适的电机和驱动器,我们需要讨论下面个几关键参数
1,电机功率
2,减速机的减速比(若通过链条传动需要考虑链条传动比)
3,驱动轮的直径
4,AGV要求的最大运行速度
举例说明:客户要求一个差速驱动、单向运行、负载300KG、最大运行速度为30m/min。
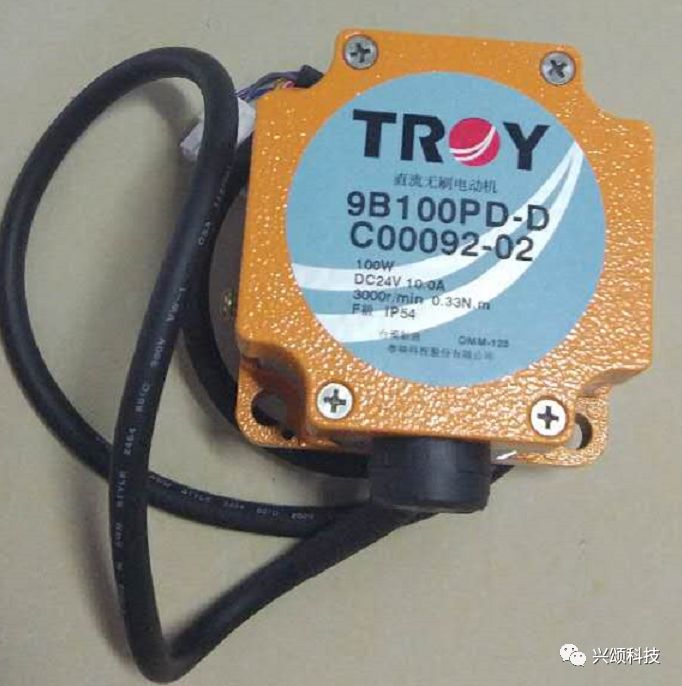
我们选择电机为:台湾泰映9B100PD-D;减速机为:9D20
所选电机参数:电机额定功率100W,电机扭矩0.33N/m,驱动轮半径0.065m,电机最高转速3000r/min,减速机的减速比为1:20,链条传动比为1:1.6。
推算过程:
电机匹配减速机后输出扭矩0.33N/m*20=6.6N/m;经链条传动后扭矩6.6N/m*1.6=10.56N/m
驱动轮子的牵引力F=轮子的力矩/轮子的半径=10.56N/m÷0.065=162.5N。
差速驱动两个电机所以驱动的牵引力是162.5*2=324N。
减速机的效率为90%,所以差速驱动能提供的牵引力大概为290N左右。一般来说,牵引400KG所需的牵引力为250N左右。
AGV运行最高速度V=电机转速/减速比/链条传动比*驱动轮半径*2*3.1415=38.31m/min
所以设计参数符合要求。
驱动器选择:
驱动器选择兴颂科技CNS-BLD-2S。CNS-BLD-2S是专为小功率型无刷直流电机设计的驱动器。为更切合AGV的控制需求,设计采用的是1驱2模式(一个驱动器可以内时协调驱动两个电机),提供包括通讯在内的多种控制方式,可视化的参数配置,对比传统驱动器来,使用更为方便。

上述所选的电机与驱动器是小负载AGV动力匹配最佳例子,其运行效率高故障率极少,调试方便,成为众多客户的选择。
相关资讯
更多- 凯傲集团&英伟达 | 共探智慧物流新未来
- Stability AI 首席执行官 Emad Mostaque 预测:5年后将不再有程序员
- 《The Gazette》:“杀手机器人”即将来临,联合国对此感到担忧
- 谷歌推出的“双子座人工智能”系统暗示该该技术巨大飞跃:分析实时信息
- 科学家发现人们很难将人工智能与人类艺术区分开来
- Movu和Righthand Robotics合作开发的全集成式机器人拣选解决方案
- Cruise首席执行官调侃称那些对无人驾驶强烈反弹的是否是”head“进水了
- 助力智能物流,科钛AGV无人叉车一直在行动!
- 快仓荣登胡润“全球独角兽榜”,机器人赛道仅5家中国企业上榜
- 工业自动化中机器视觉的五大应用优势