做机器人,身手敏捷很重要
转载 2020-09-01 09:40 优必选科技 来源:优必选科技

「AI大咖说」第四期,机器人“关节”C位出道,一起了解重要部件“伺服驱动器”。
上世纪60年代,科幻插画中的机器人“关节”几乎由大螺丝钉结合;如今回头细想,才发现这种关节结构根本“不科学”。

到了近年,一些真人模特PS机器人身上的关节处有了明显的分割和机械结构,看上去似乎“有点意思”。

那么,真正的机器人关节运动系统到底是怎样的呢?特别是那些灵活敏捷的机器人,在多关节紧密配合下,完成精准的运动和指令,它们是怎么做到的?
6分钟搞懂伺服驱动器
——机器人灵活运动的关键所在 ∆
什么是伺服驱动器
人的运动系统,分别由骨骼、关节、肌肉构成,因骨骼位置的变化而产生运动。然而,骨骼本身是不能运动的,骨骼的运动主要靠肌肉牵引和关节转动。
伺服驱动器,就类似于人类肌肉的伸缩、牵引,是用来控制伺服电机的一种控制器,为机器人的运动系统提供着强劲动力。

伺服驱动器研究现状
随着近年机器人蓬勃发展,伺服驱动器已经得到广泛应用。目前市面上伺服驱动器的类型,包括了电驱、液压、线驱、气动,以及复合材料等形式。
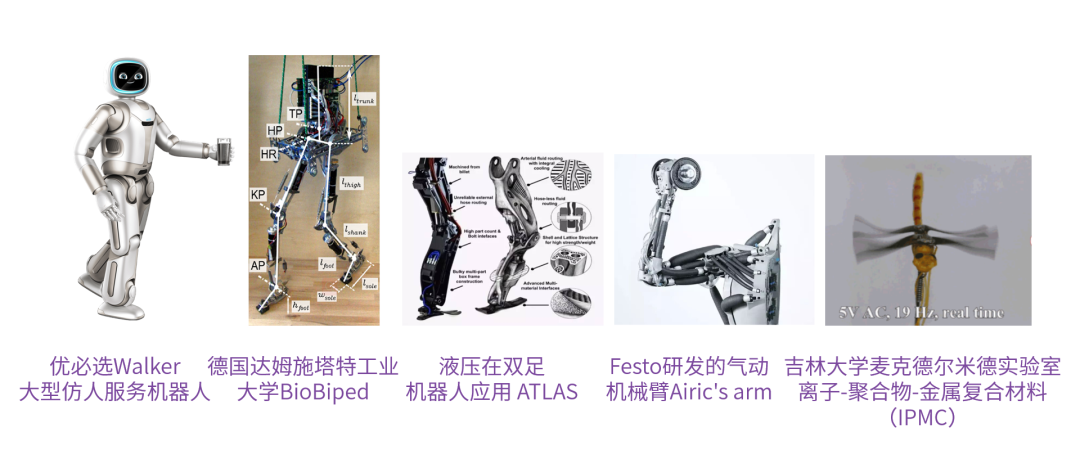
伺服驱动器的主要类型
综合来看,电驱型是目前发展最广泛、技术最成熟的方向。利用电机和轴承模拟人的关节,从而控制机器人稳定行走,是机器人通常的控制方式。本期课题也将围绕这个方向展开。
电驱型伺服驱动器
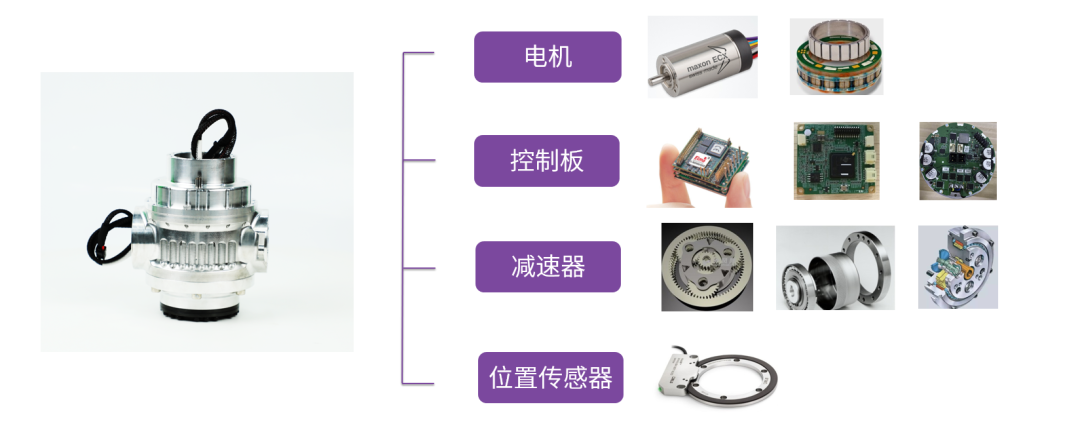
· 基本构成
伺服驱动器的基本硬件构成,主要有电机、控制板、减速器、位置传感器,它们通过执行接收到的通信信号控制输出端的旋转角度,不管是什么样的产品类型和力矩大小,这四种基本组成都不可缺少,是机器人实现灵活运动的关键所在。
· 功能原理
伺服驱动器通过不同方向的组合,就成了机器人的“关节”,决定着机器人的运动方向,也就是经常听到的机器人“自由度”。比如Walker有36个伺服驱动器,就是有36个自由度。
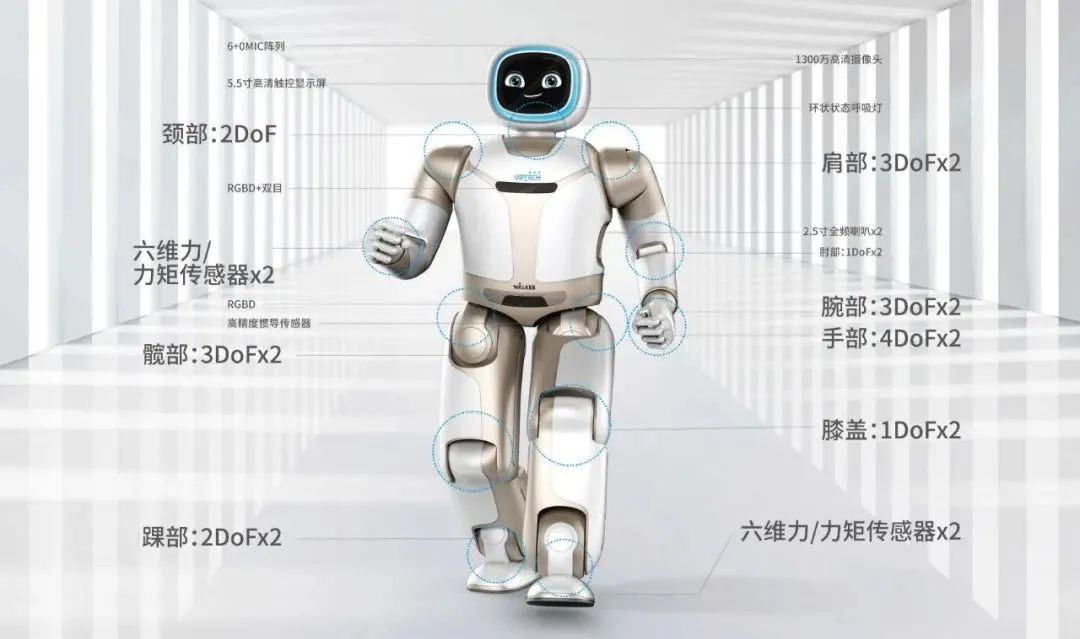
Walker全身具备36个高性能伺服关节
要想实现机器人的精准运动,每个关节需要产生精确的输出位置和力矩。当伺服驱动器接收到主控的位置命令后,可以实时响应命令,多个舵机协调运行,就可以产生犹如人类一般灵活的运动。

· 开发类型
从开发类型上来看,伺服驱动器主要分为小型伺服驱动器和大型伺服驱动器,它是靠什么区分的呢?答案是:输出力矩。
小型伺服驱动器,优必选科技开发0.2Nm~6Nm范围,主要应用在教育、娱乐等桌面机器人上。大型的伺服驱动器,则应用在大型仿人服务机器人Walker、智能服务机器人Cruzr、机械臂等产品上。

· 大型伺服驱动器的类型
从设计方式上,大型伺服驱动器可以分为三个类型,分别是常规方案、SeriesElastic Actuator(SEA)、本体驱动器。

大型伺服驱动器的三种类型 (图片引用知乎@任赜宇 )
第一种是常规伺服驱动器,常规电机+高减速比的减速箱+高刚度输出端,用来检测力矩输出;
第二种是SEA伺服驱动器,区别于常规方案,SEA在输出端加了一个弹性体,用位置传感器去检测弹性体的形变,从而推断出它的力矩大小,是目前的研究较多的一种设计方式;
第三种是本体伺服驱动器,高输出力矩密度电机+低减速比的减速箱,它的特点是小惯量、响应速度快。

大型伺服驱动器各类型对比 (图片引用知乎@任赜宇 )
伺服驱动器的技术与特点
前面提到,伺服驱动器具有四个基本构成部件。其实除了这四个“基本要素”外,为了增加伺服驱动器的特性和功能,还包括力矩感知和控制、电磁制动器、软件算法、中空设计等技术设计。
· 力矩感知和控制
机器人关节力/力矩感知能够带来许多功能的突破,因为机器人在运行的时候,需要考虑到多种情况:



左右滑动查看更多>>
那么在机器人身上,如何才能实现好力矩感知和控制呢?方式有以下几种:






左右滑动查看更多>>
· 软件算法
不管是伺服驱动器,还是伺服电机,伺服算法大部分都是基于电机的矢量控制来扩展来进行使用的。
优必选科技的伺服软件算法提供丰富控制接口,包括高精度位置传感器、PID参数控制、各种保护机制、控制模式等,全面保护伺服驱动器的安全可靠运转,灵活应用于各种场合。
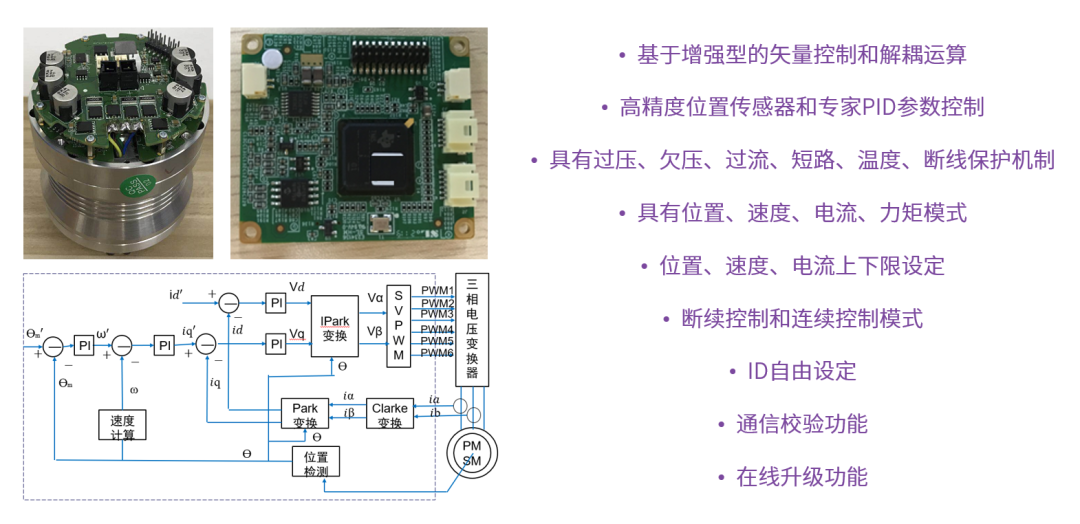
优必选科技伺服软件算法功能齐全
· 电磁制动器
电磁制动器有两种方式,第一种是转子刚性连接一个多辐条(片)装置,当电磁阀断电时,在弹簧的作用下,金属棒插入辐条之间的缝隙中,阻挡电机转子旋转;当电磁阀通电时,在电磁力的作用下金属棒收起,辐条可以跟随转子旋转。
第二种则是在上下两个金属中添加石墨片,当电磁抱闸通电吸合的时候,它对电机不制动;当断电时,抱闸就会在弹簧的作用下抱住电机转子产生制动。
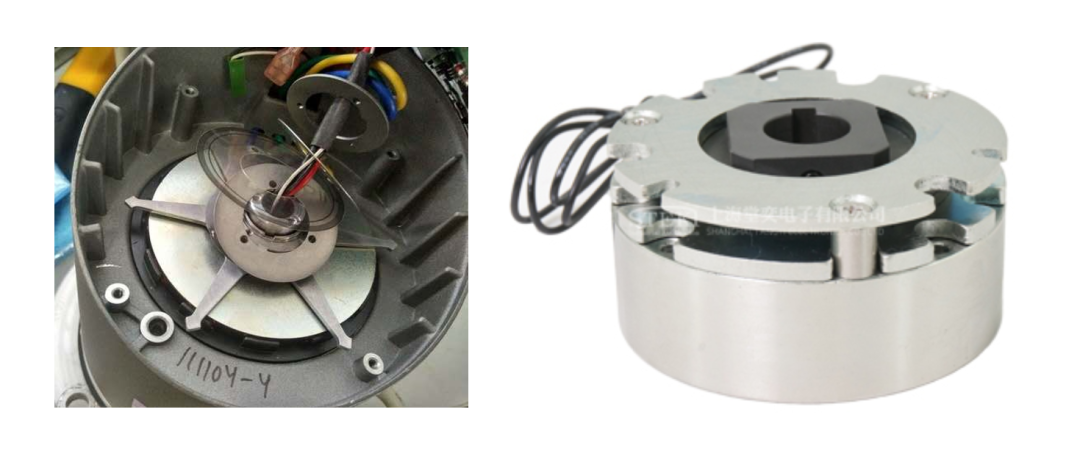
电磁制动器的两种方式
不管是哪种方式,当电磁制动器加入伺服驱动器后,在软件上一定要注意控制机制。因为在高速的情况下,如果直接把金属棒插入到辐条里,非常容易打坏伺服驱动器。
· 通信
目前通讯方式应用最多的有RS485,CAN,EtherCAT等,具体选用哪一种方式,就要考虑伺服驱动器在不同机器人中的应用场景。

· 中空设计
一般的家庭应用或者服务机器人,不可能像工业领域那样在外部走线,因此伺服驱动器做成中空设计,简化外部结构,是最方便的。如果中空结构加上滑环设计,就可以实现伺服驱动器的多圈输出。

优必选伺服驱动器的研究与应用
由于构成复杂、控制精度要求高,伺服驱动器具有很高的技术门槛,成本居高不下,往往占到机器人总成本50%以上。

优必选科技自2012年开始攻克伺服驱动器的的难关,截止目前,已经设计和生产了40多种不同的伺服驱动器,掌握了从0.2Nm小型伺服驱动器,到120Nm大型伺服驱动器的量产能力,并在不同系列机器人上实现大规模应用,做到研产销链一体化。

在小型伺服驱动器上,包含了0.2~0.6Nm的范围,电压覆盖了7.4伏、11.1伏、24伏等。这些伺服驱动器目前已经实现大批量量产,广泛应用于小体积精密场景。
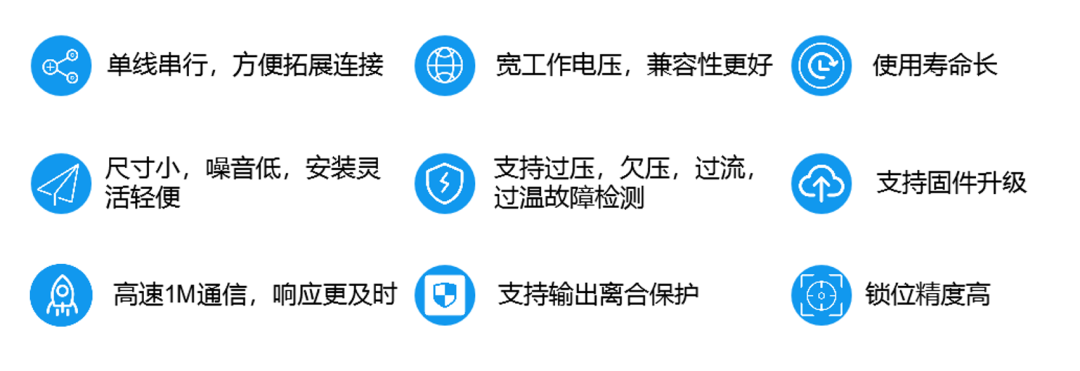
优必选小型伺服驱动器特点
比如拥有16个运动关节的Alpha系列,就是应用12kg·cm的伺服驱动器,支持串口通信,结构紧凑,精度高,噪音低,能够灵活实现跳舞等运动功能。

Alpha系列内含16个优必选科技自主研发的专业伺服舵机
在大型伺服驱动器上,最大的一款是120Nm,最小的是15Nm,主要应用在Walker和大型机械臂上,它的电压基本上在48V,依据电机把斜坡减速,以及高精度位置传感器的方式。

优必选大型伺服驱动器特点
这些大型伺服驱动器,分别应用在Walker的肘部、上臂、肩部前向、髋部前向、踝部前向等关节上,以此实现平稳快速的行走和灵活精准的操作。

面对这么多性能指标的伺服驱动器,在做机器人的时候,到底该怎么选择呢?根据三种不同的应用场景,来看一下伺服驱动器的选型指标及排序吧!
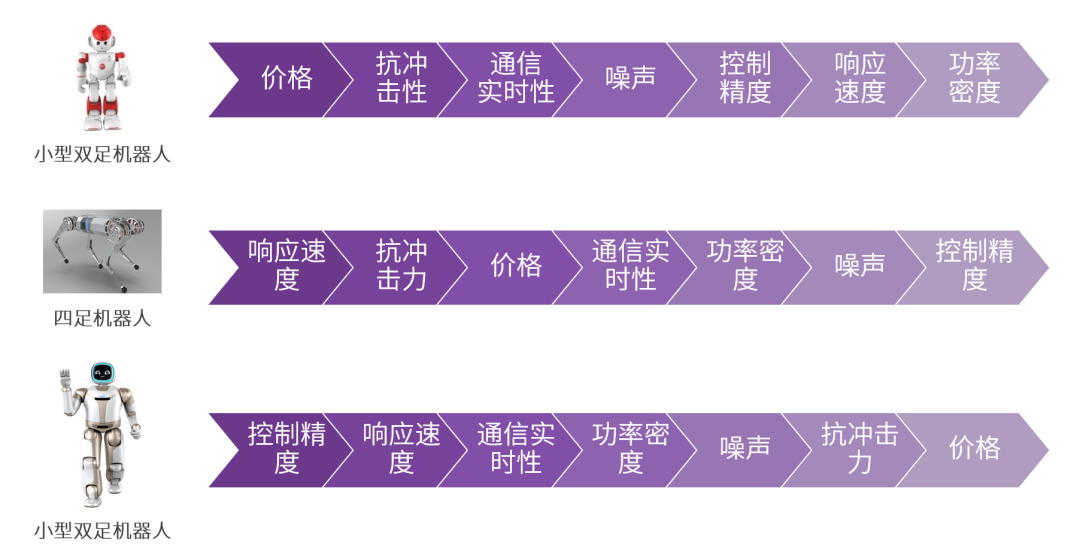
伺服驱动器的选型指标
桌面型的小型双足机器人,往往需要大批量的量产,因此性价比是非常敏感的要素;对于四足机器人来说,响应速度、抗冲击力、价格的指标要求比较优先;大型双足机器人的要求则要高一些,特别是控制精度、响应速度、通信实时性等。
未来研究方向
随着近几年消费机器人的热潮,不同机器人对伺服驱动器的要求也越来越高,在电驱伺服驱动器的方向,仍有不少改进空间,比如减小体积、外观流畅、提升功率密度,以达到跑和跳的动作需求。
双自由度设计也是方向之一,把两个自由度做在一个伺服驱动器里,同时产生两个垂直的输出,例如髋部,可以把前后的运动和侧向的运动做成一体,以此来节约体积和重量。此外,还有IMU惯导功能的伺服驱动器、多圈旋转模式(中空滑环设计)、具有刹车/离合功能伺服驱动器、具有弹性储能装置的伺服驱动器、新材料(如碳纤维)使用等,也是未来的重点研究发展方向。
伺服驱动器作为核心技术的布局之一,未来,优必选科技仍会继续更深的挖掘和技术的积累,致力让人工智能推动全产业发展,让智能机器人走进千家万户。