安全定位和图像分析:技术在农业机器人自主工作中是否足够可靠?
原创 2021-12-04 13:06 DDing 来源:AGV网
随着农业机器人和先进技术变得越来越复杂,农民对安全性、可靠性和准确性越来越担心。解决这些问题的关键在于不断努力改进技术。
行业专家分享了机构、企业和大学如何努力提高两项基本技术能力。有许多活动部件,它们都需要能够协同工作。本节重点介绍为了使这些技术足够可靠以满足用户需求而必须采取的措施。
在安全定位方面,Tanner Whitmire(Hexagon /NovAtel公司 自主和定位部门的负责人)分享了定位精度和完整性如何影响自主解决方案,而 Joaquin Reyes González(欧洲 GNSS 机构)解释了为什么全球导航卫星系统 (GNSS) 是自主机器人的首选定位选项。
在图像分析的主题上,Hajar Moussanif(来自法国卡迪阿亚德大学)讨论了深度学习模块如何改进机器人“观察”和分析各种物体(例如作物和杂草)的方式。Markus Höferlin(农业革命)继续讨论,解释了如何使用深度神经网络来训练机器人更准确地识别物体和条件,从而提高它们的整体性能。Barney Debnam(来自微软)通过提供一个框架来了解当今的技术是否足够可靠以实现农业的完全自主,从而将焦点重新回到首要问题上。
准确安全定位的重要性
在农业中,定位系统已经存在很长一段时间了。今天的系统主要用于小规模的任务。然而,农业机器人和无人驾驶拖拉机的出现将要求技术供应商进行更大的思考。
海克斯康(Hexagon )农业销售和业务发展经理 Tanner Whitmire :“定位系统的主要目的是创建应用地图,例如播种、种植和产量地图,以及向左或向右引导机器在过去的几年里,重点一直放在定位系统的准确性上。我们最初以几米以内的精度开始,并且已经能够将其降低到分米级精度或厘米级精度。”
随着行业向完全自主的解决方案过渡,Whitmire 继续说道,现在使用的简单算法和硬件将需要升级。位置完整性和安全定位变得越来越重要。这要求技术供应商减少可接受的错误数量。目前,与农业应用相关的定位误差主要有定位误差、跨航迹误差和沿航迹误差三种。
Whitmire 解释说,定位误差是一种发生在经度和纬度上的误差。下一个错误是跨轨道错误,当试图沿着路径行驶时,机器向左或向右偏离。Whitmire 说,一个小的横向误差将代表机器靠近中线,但误差越大,农民的工作就越困难。
第三个是沿轨道误差,即车辆沿着路径行驶但在应有的位置超前或超后太远。所有这三个误差都与水平精度有关,但 Whitmire 认为未来技术公司也需要考虑垂直精度和其他变量。
他说:“如今的定位农业确实非常注重定位的准确性。但随着我们开始向完全自主的解决方案过渡,我们需要将重点扩大到包括定位完整性。”
两者之间的差异可能有点令人困惑,但 Whitmire 是根据置信度来描述的。在任务位置(所谓的准确率),“准确率表示为 95% 的置信水平。”同时,在有保证或安全的位置(完整性),有信心在第 99.999 个百分位。
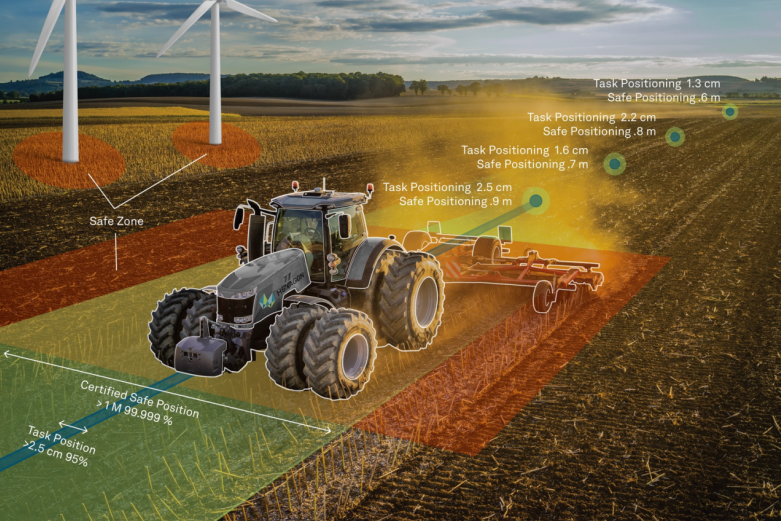
在自主中实现安全定位,Tanner Whitmire,Hexagon I NovAtel
Whitmire 说:“任务位置代表更精确的位置,因为它可以减少错误。”“这是一个更简单的软件解决方案,使我们能够保持我们的准确性水平。随着我们扩大该职位的完整性,我们必须考虑更多错误,这将刺激必须改进我们的软件的挑战。”
为了向更安全、更智能和更先进的系统迈进,专注于定位的公司需要包括传感器、GNSS 和其他技术来帮助提高准确性。
“通过添加这些类型的技术和这些功能,我们可以将信心提高到 99.999%。”Whitmire 说。“当我们过渡到完全自主的解决方案并将驾驶员带出驾驶室时,这至关重要。我们需要确保我们有 99.999% 的信心,这辆车不会撞到任何人或任何东西。”
信号可靠性的重要性
由于机器人制造商和技术公司专注于从硬件和软件的角度改进定位系统,许多其他公司专注于帮助实现准确定位的卫星导航服务。其中一个组织是欧洲GNSS 机构 (GSA)。
GSA 营销开发技术官 Joaquin Reyes González 说:“我们是这些卫星的运营者和寻找者。”“我们在线发布的是伽利略信号。”
Galileo 是欧洲的 GNSS,但它只是 GSA 为确保安全定位而开发的解决方案之一。该机构还拥有有助于提高 GNSS 精度的欧洲地球静止导航覆盖服务 (EGNOS) 和欧盟的地球观测计划哥白尼,该计划侧重于“从卫星地球观测和原位获取信息服务”。 (非空间)数据。
“很明显,这项卫星技术和我们收到的所有这些信息正在为我们提供新一代的农业,农民并不孤单。”González 说。
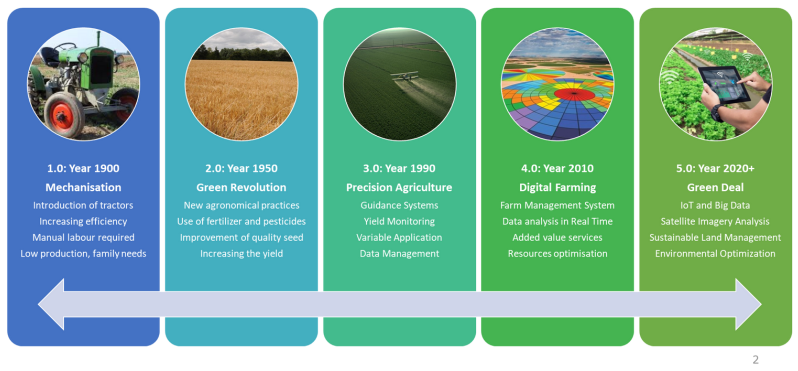
Farming 4.0 结束 5.0 已经到来了吗?Joaquin Reyes González ,GSA
伽利略系统是在传统 GPS 之后开发 20 年的系统,用户可以从更好的体验中受益。使该系统与众不同的第一件事是它是多频率的。用户可以访问开放服务的多频,其中使用多个渠道传递消息以提高准确性。
“伽利略卫星正在传输信息,不仅使用一个频道,而且使用多个频道。”González 说:“这为用户带来了更好的性能和更好的位置,因为接收器可以接收来自不同频道的完全相同的信息。”
伽利略还提供开放式导航信息认证(确保卫星到达正确的位置)、信号认证服务(加密确保信号来自正确的位置)和高精度服务(提高准确性和精度)。结合起来,这些功能产生了一个高度准确和精确的系统,用户可以信赖它来支持安全定位。
“如果我今天有一个消息,那就是让用户考虑使用 GNSS 而不仅仅是 GPS。这是最重要的事情。”他说。
深度学习的重要性
除了帮助农业机器人在复杂环境中导航的安全定位系统外,图像分析对于使这些强大的机器有效执行工作同样重要。消除或简化任务当然是农业工作民主化的重要组成部分。Hajar Mousannif是一位成就卓著的卡迪阿亚德大学副教授,他创立了数据科学硕士课程,并且是 2020 年 WomenTech 全球人工智能包容性奖的金奖获得者,他的想法更大。
她说:“我在 TEDx 演讲中说我被一个梦想所困扰,一个以某种方式改变这个世界的大梦想,我一直相信技术和人工智能有能力让人们更快乐。在我讲话后的五年里,世界确实发生了变化,但人们并没有变得更快乐。”
COVID-19 在世界范围内造成了毁灭性的影响。在Mousannif的祖国摩洛哥,失业率、社会差距和贫困都在上升。这影响了她的人生观。
“通过创造酷炫的技术可以让人们更快乐,但更多的是保证体面的生活和确保人们的基本需求。”
农业机器人可以发挥巨大作用。据Mousannif说,她正在与美国公司 FotaHub, Inc. 一起领导一个项目,以扩展他们已经拥有的第一个摩洛哥制造的人形机器人 Shama 的能力。
“随着技术在农业领域的大量采用,我们不仅可以让农业企业获得更高的利润、更可持续、更安全和更环保,而且还将确保农村地区的农民过上体面的生活和接受教育,而不是每天花几个小时做机器人可以高效完成的高度重复和繁重的劳动。”她说。
“在摩洛哥,我们成功地将许多与农业劳动力相关的任务自动化。多亏了计算机视觉,许多机器现在能够根据不同的水果和蔬菜的大小和成熟度对其进行识别和分类。”
这种能力是深度学习的结果,深度学习是一种人工智能功能,可以帮助计算机和机器人模仿人脑。具体来说,深度学习模仿人类智能,使机器能够处理信息、推理、适应环境并解决更复杂的问题。它可用于农业,帮助机器人处理植物图像并帮助检测病害作物。为了取得成功,这些深度学习模块需要使用数据进行训练。
“我们需要为算法提供具有缺陷或疾病类型和位置的图像,并让模型在训练后学习如何定位它们。”Mousannif 说:“值得一提的是,缺陷,无论是疾病还是害虫,即使是人工检查员也很难发现。这也非常耗时,因此任何改进自动化、提高效率和保持高质量生产的东西都非常受欢迎。”
在尝试训练深度学习模块时,环境因素会带来挑战。算法必须能够考虑晴天和阴天条件或植物阴影等因素。光线不足或曝光不当影响准确度的图像。根据应用,可以使用其他图像处理技术。例如,图像可以使用锐度从某些图像中去除模糊。根据上下文,诸如模糊之类的事情可能会损害机器的准确性。
有一些技术可以提供帮助。卷积神经网络 (CNN) 被训练以与人类相同的方式对图像进行分类。迁移学习是一种机器学习方法,它解决了数据集中没有足够多或没有任何标记图像的问题。图像分割可用于对异常进行分类、检测和分割。在农业领域,这意味着确定健康植物中的杂草和患病植物。有很多人为这项重要的工作做出了贡献,但通往超精确自主技术的旅程是漫长的。穆萨尼夫仍然专注于最终目标。
她说:“通过积极为人工智能领域做出贡献,我们不仅可以确保我们拥有更美好的未来,也将为子孙后代创造更美好的未来。我们需要努力打造真正重要的技术,解决真正的问题,对人们的生活产生直接影响,最重要的是,确保包容并保护我们的人性。”
改进计算机视觉的重要性
许多最重要的农业任务对人类来说相对不受欢迎,这就是为什么农业机器人的大规模采用,正如穆萨尼夫所说,将极大地影响人们的生活。凭借其人工智能机器人,“除草即服务”供应商Farming Revolution(前身为 Deepfield Robotics)专注于一项特别乏味且经常危险的工作:除草。
机器人自动驾驶穿过田野,使用多光谱相机拍摄它们遇到的图像。然后,使用人工智能和深度神经网络,机器人识别农作物和杂草。最靠近作物的杂草可以在不使用化学品的情况下被有效去除。这听起来很简单,但 Farming Revolution 人工智能负责人 Markus Höferlin 表示,最终结果是大量幕后工作的产物。
他说:“一开始,主要挑战之一是计算机视觉部分。那么,为什么这会如此具有挑战性?如果我们看看一些我们也有很多计算机视觉任务的工业工厂,我们总是会看到我们必须限制我们的环境才能降低它的复杂性。”
然而,农田是完全不受约束的。有不同的土壤类型和有叶子的作物,有些作物与杂草重叠并相互重叠。植物在早上和晚上以及从一天到第二天的外观也往往不同。不断变化的室外环境使问题进一步复杂化。农业革命开始了。
“我们实际上正在付出巨大的努力来捕获和标记我们能想到的所有品种的数据。”Höferlin 说:“我们从 50 多个不同领域捕获了数据。我们在深夜两点开始我们的捕获活动,在那里完全黑暗,植物有时仍然关闭,而在早上植物慢慢开放。我们捕捉图像到下午,直到晚上开始。所以,我们有我们能想到的所有不同的光照条件。”
Farming Revolution 还捕获了各种天气条件(露水、灰尘、泥浆)和季节的数据。数据收集了五年。超过 65 个不同的物种被标记为每像素 99% 的准确率。结果是超过 1200 万张带注释的图像——大量的训练数据。人工神经网络将使用这些数据帮助机器人分析和处理现场图像。
“这才是真正与众不同的地方,”Höferlin 说。“有了各种各样的数据,我们设法穿过现场,打开机器人,然后继续前进。我们能够以 99% 的准确率做到这一点,而无需重新训练神经网络并克服泛化数据的问题。”
然而,即使有如此数量的数据,农业革命仍在不断努力以获取更多数据。数据越多,从定性分析中获得的洞察力就越好。它还使公司能够解决任何问题并随着时间的推移改进网络。
“例如,如果一位农民拥有我们的机器人,并且在某个特定的田地看到它,他会对结果不满意。他可以告诉我们。请检查发生了什么,或者让它在这里更好地工作,”Höferlin 说:“农民只需将数据上传给我们。我们可以对这些数据进行评估,看看哪里可能存在问题,如果我们发现分类器表现不佳,我们可以根据我们学到的内容标记数据,并在我们的训练集中使用这些数据。”
持续改进的重要性
安全定位和图像分析每天都在改进,但最大的问题仍然存在:这些技术是否足够准确以可靠地自主工作?微软农业综合企业解决方案主管 Barney Debnam表示,这要看情况。
“这取决于你用自主权解决的问题这取决于特定农业经营的风险状况。”他补充说;
Debnam 描述了需要考虑的三个主要风险概况:对人类的风险、对作物或牲畜的风险以及对环境的风险。
Debnam 说,考虑这些风险状况对于开发解决方案的公司来说尤为重要。例如,跟随采摘者并提供篮子来携带商品的机器人系统与喷洒器不同,喷洒器可能在水区上方的葡萄园喷洒农药,向公众提供资源。
“对于我们所有正在设计自主系统并考虑风险的人来说,确定风险并了解影响非常重要。”Debnam 说,
有几个框架可用于评估该技术是否足够强大以提供自信、安全的结果。Debnam 特别提到了美国农业和生物工程师协会、农业安全与健康杂志、国家标准与技术研究所以及欧洲网络安全法案中的 ENISA 工具。他鼓励技术提供商使用这些资源。这是技术供应商与客户建立信任的方式之一。
另一种方法是解决 Debnam 所说的“基本监视”。这是食品公司和消费者希望获得更多透明度的愿望。许多解决方案都专注于执行任务,而不是证明特定生产过程在特定日期的特定时间发生的信息。当机器人变得完全自主时,客户将期望更清楚地了解它们的工作方式和行为。
目标是创造一个每个人都茁壮成长的环境。Mousannif最好地表达了这一点:
“我们可以使用人工智能,我们可以使用技术,但是如果我们不能创造价值,我们不能让这个世界变得更美好,那么技术有什么用?”她总结说:“总的来说,人工智能和技术必须与社会影响和价值创造齐头并进。”
相关资讯
更多- 专注细节 见证不同——中国力量闪耀LogiMAT 2026
- 一带一路 出海向新丨中叉网/AGV网2026亚欧大陆万里行在德国LogiMAT 2026正式启航
- 中国AGV网上周热点回顾(2026年3月16日-3月20日)
- 中国AGV网上周热点回顾(2026年3月9日-3月14日)
- "质量安全与机器人产业健康有序发展”系列活动暨首届机器人检验检测与标准认证研究大会在福州举行
- 中国AGV网上周热点回顾(2026年3月2日-3月7日)
- 杭叉集团|聚力而行,共赴山海——杭叉集团外销系统2025年度总结表彰暨业务研讨会圆满举行
- 立春序开,万象更新:工业车辆行业的“春之信”
- 中国AGV网上周热点回顾(2026年1月26日-1月31日)
- 杭叉海外|扬帆东南亚,奋进正当时:杭叉越南首届年会隆重召开