柔性无边,看菲家AGV解决方案如何“破局”!
转载 2023-11-20 11:54 IMA市场部 来源:IMA市场部

近年来,AGV技术不断演进与完善,快速渗透各个领域。具备智能、灵活和安全特性的AGV自动搬运系统,已经显著提升了物流自动化水平。与此同时,随着AGV产品种类的增加,它们也越来越多地与互联网和大数据技术融合,增强了物流系统的感知和自主决策能力,实现了显著的智能化提升。此外,随着AGV产业的快速发展,不断增长的需求、技术成熟度的提高以及成本的下降,将推动AGV应用范围更广泛地扩展。
AGV发展趋势
🔘 空间合理化
🔘 路径最短化
🔘 库存最小化
🔘 错误最低化
🔘 布局柔性化
01.
系统可全套采用菲家产品
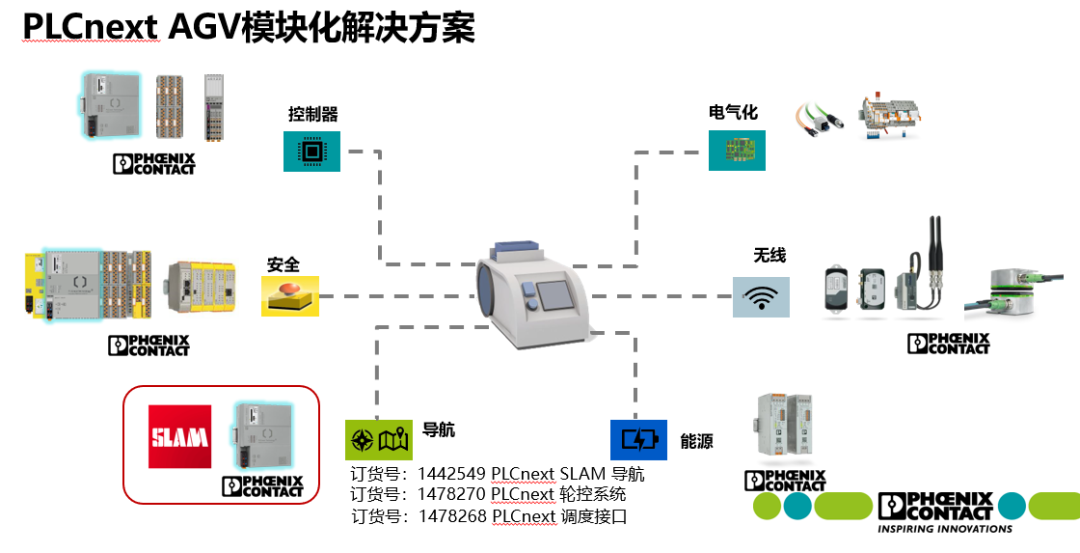
菲尼克斯基于覆盖全产业链产品的优势,可提供AGV控制所需的几乎所有电气设备:PLC、IO、无线、交换机、功能安全模块、IPC/HMI、电源、继电器、端子等。
但凡是AGV内使用的控制类设备,菲尼克斯总能提供满足您需求的方案。
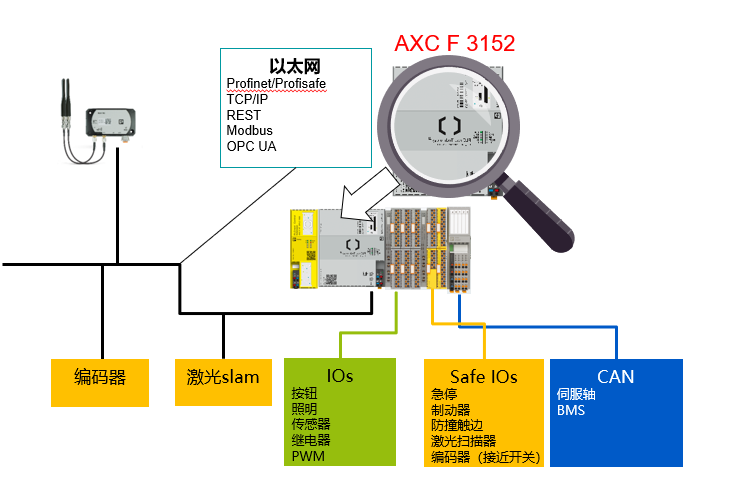
AGV的大脑采用基于PLCnext技术平台的控制器AXC F 3152, 可以同时部署轮控算法和SLAM算法,大大缩小目前市场工控机+小PLC所占用的空间;同时,该控制器可以在本体扩展IO模块使得部署更加紧凑;PLCnext平台支持丰富的API接口,满足不同的AGV车型和业务场景。
02.
基于开放的PLCnext Technology框架
目前,传统自动化厂商多数是提供特定的编程软件来实现工程师与控制器之间交互,方式相对固定,开发自由度不高,相关功能主要依赖于自动化厂商的开发维护与更新,给用户的自主开发工作带来了不少困扰。面对新形势下工业4.0以及IIoT的场景,用户期待更自由灵活,符合个性化需求的编程交互方式。
那么,PLCnext平台究竟是采用何种机制来保障此开放式平台稳定、实时、高效的运行?在此平台上又可以做哪些多样化的开发?
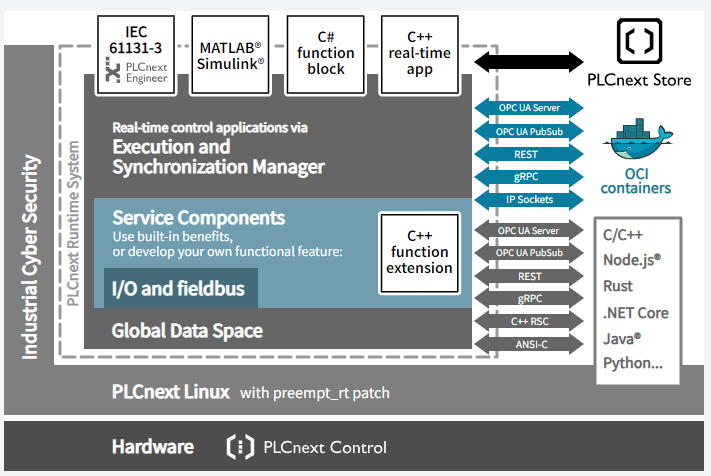
从根本上来讲,起到关键性作用便是控制器的架构和核心组件,它们是整个控制器底层坚实的基石,也决定了面向客户端可呈现出来的具体开发功能。菲尼克斯电气推出的PLCnext Technology开放式控制平台,相较于传统的控制器架构具有颠覆性优势。从图中可以看到PLCnext总体架构的细节,主要分为五大部分:硬件与操作系统、中间件、PLCnext核心组件、内部用户组件、外部用户组件。
03.
基于主流的激光SLAM导航方式
AGV根据导航方式可以划分为:磁导航、电感应线导航、二维码导航、激光导航等方式。菲尼克斯AGV采用的是激光SLAM导航方式。而目前激光SLAM导航可以通过激光雷达自动感知运行的周围环境,将点云数据传递至导航控制器中,完成自动建图,规划路径。相对于传统导航方式,激光SLAM导航方式赋能AGV更加自主智能。使之具备技术领先,方案成熟的特点:
定位绝对精度高
安装调试便利性
路线柔性布置
无需提前敷设磁条、电缆、反光板等
不受参照物、恶劣环境影响
菲尼克斯的slam导航算法可以直接部署到控制器中,和PLCnext平台框架相融合,从而满足相关数据的交互,实现slam导航。导航精度可以达到±10mm。
04.
打造“SLAM导航、车体控制、调度、功能安全”
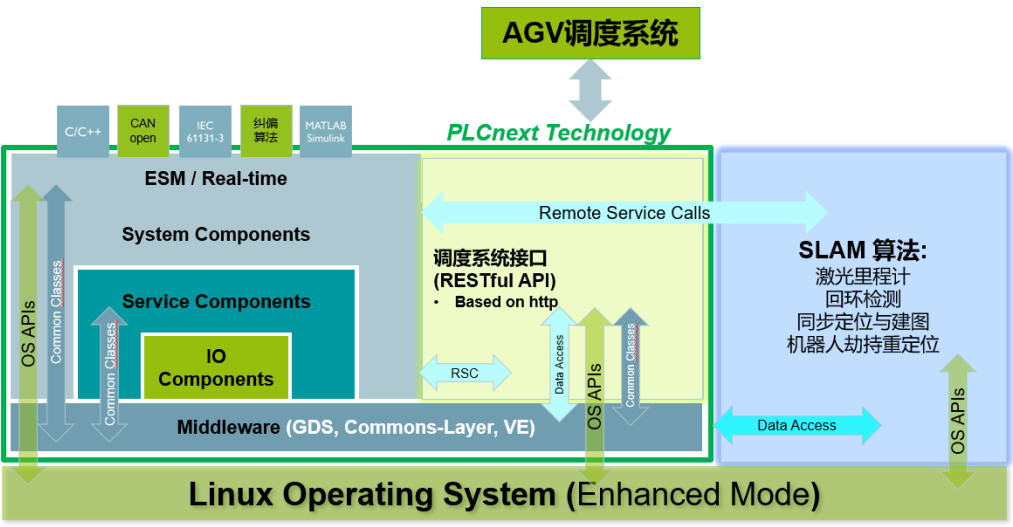
想要实现复杂工业场景的AGV工作流程,AGV精准运行、自主导航尤为关键。其中最重要的部分便是SLAM算法及与AGV运动控制算法的开发并部署在合适的控制平台上实现资源的最大利用率。而菲尼克斯PLCnext全新一代开放式控制平台兼具了传统控制器稳定性与可靠性,在一套平台上即可实现传统方案中需要工控机、PLC、功能安全模块来实现的SLAM导航、轮控管理、功能安全。在PLCnext同一平台上实现功能多合一,提升了数据交互便捷性并且显著降低了用户成本。
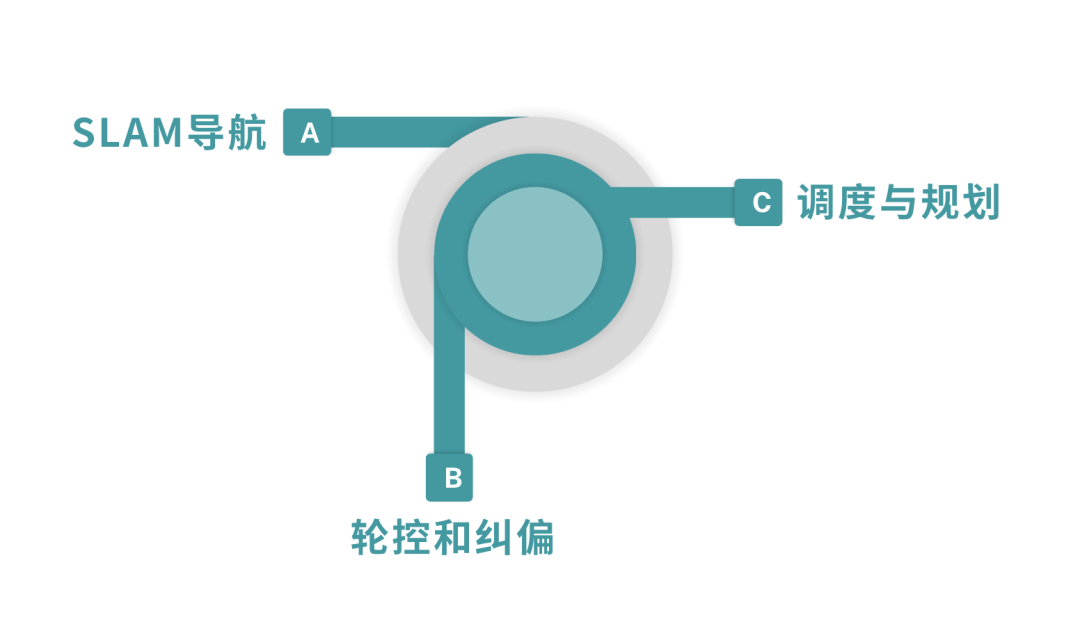
PLCnext在保障传统IEC61131-3程序实时运行的同时又兼容多种高级语言编程、仿真算法开发和开源程序的自由应用。借助于PLCnext技术的特点和平台优势可以提供包括:
· 使用激光雷达SLAM 进行地图构建;
· 提供多种运行方式:舵轮、差速轮、差动轮;
· 提供API接口和调度系统对接,以满足不同的AGV车型和业务场景。
05
.融合IOT技术,打造云边端解决方案
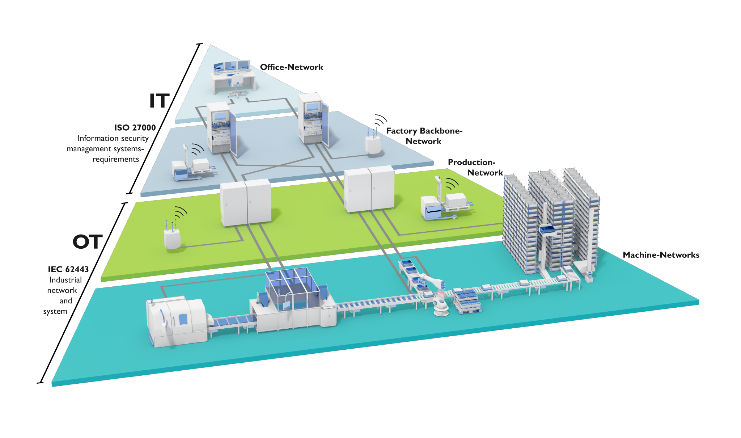
菲尼克斯电气PLCnext平台跨越IT与OT鸿沟,助力工厂数字化转型, PLCnext平台既支持高级语言开发智能算法,也可对接各层级系统交互接口,同时提供工控信息安全策略部署,提升了平台的互通性,还能便捷对接云平台,从而为物流行业的智能化以及数字化转型提供了有力的技术支撑。
相关资讯
更多- 永恒力启动新一代EFG系列锂电平衡重叉车销售
- 美国车载式叉车生产商Donkey Forklifts迎来创立40周年
- 冷库托盘位从2000个增至逾1.5万个:KNAPP以SAP EWM打通Derstine’s两座温控仓
- 优必选携手哈萨克斯坦:共建中亚具身智能新生态,打造“一带一路”科技走廊
- WAIC 2026 | 智元最强“打工天团”集结,未来工作现场见!
- 仙工智能具身智能家族集结亮相|2026 亚太国际具身智能产业链展览会,青岛开展!
- 镭神智能机械式多线防爆(本安和隔爆)激光雷达:煤矿石油化工高危场景适配方案
- 生态大会|睿享同行共筑产业生态,视觉领航深圳智造未来
- 二十载深耕破局出海 环信配件打造中国工业车辆配套出海新标杆
- 直击青岛物流装备展|中国超窄通道叉车销量榜首合肥搬易通(MiMA 米玛)现场交付!