林德物料搬运:在通往户外自主叉车的路上
原创 2023-12-20 08:56 南山 来源:AGV
林德MH和阿沙芬堡应用科学大学展示 "KAnIS - 合作式自主内部物流系统 "研究项目成果
2023 年 12 月 5 日,货物装卸专家林德物料搬运(MH)和德国阿沙芬堡技术大学(TH AB)在阿沙芬堡工厂的试验场通过现场演示展示了研究项目 "KAnIS - 协同自主内部物流系统 "的成果。在这几个测试项目中,针对在室内和室外搬运货物的自主平衡车的高要求应用开发了解决方案。其中一个重点是其合作行为:这些车辆通过 5G 网络和边缘服务器实时交换信息,并可相互发出障碍物警报。作为巴伐利亚自由州 "信息和通信技术 "研发计划的一部分,该项目历时近四年,获得了约 280 万欧元的资助。
林德重工的 KAnIS 项目发起人 Stefan Prokosch 确信:"自动驾驶汽车将逐渐接管越来越多的运输任务。作为行业技术领导者之一,林德内部物流公司希望让使用平衡重叉车运输货物或装卸卡车的客户也能享受到自动驾驶汽车的好处。"然而,室外区域对叉车的要求远高于纯室内设备。其中包括倾斜度和坡度、更高的人流量和车流量,以及天气影响和温度条件。"Prokosch 解释说:"得益于与 TH AB 的联合研究工作,我们能够针对这些复杂的要求开发出可行的解决方案。项目完成后,研究成果将成为进一步开发项目的重要基础。"
该项目的总体目标是研究如何通过联网自动驾驶车辆的合作行为来提高运行可靠性和操控性能。为了完成这项综合性任务,项目成立了几个子项目,分别涉及车辆的定位、控制和调节、叉车之间的合作、载货工具的识别、天气影响的处理、预测性维护、路线优化和自动装载管理。
"对于 TH AB 而言,KAnIS 项目是一个非常复杂的跨学科研究项目。"TH AB 工程学院 KAnIS 项目经理汉斯-格奥尔格-斯塔克(Hans-Georg Stark)博士在活动中总结道:"十位教授以及众多研究助理和学生参与了该项目。TH AB 的科研活动与林德 MH 多年的汽车开发专业技术之间的深入交流使项目合作双方受益匪浅。"

从明年开始,自动平衡重叉车将得到进一步的开发和测试,以便将来在林德物料搬运工厂承担特定的物料流任务。其中之一是护顶罩的运输,将其从预组装到主组装线的特殊负载载体上。
真实条件下的运行测试场景
四辆林德 E20、E25 和 E30 电动平衡重叉车的载重量为 2.0 至 3.0 吨,配备了电动液压转向系统(林德转向控制系统)、带电子载荷图的林德安全驾驶辅助系统和集成货叉定位器。"研究成果的实际应用是林德MH和TH AB的一个重要方面。"林德MH高级研发主管Mark Hanke强调说。从明年开始,这些车辆将接受进一步的开发和测试,以便将来在工厂中承担四种特定的物料流任务:托盘笼运输和装有电池的托盘运输,以及车辆框架和驾驶员保护顶棚的运输,这些都是通过特殊的装载车从预组装线运到主组装线的。前两种应用纯属室外作业,而在另外两种应用中,叉车既可在车间内行驶,也可在车间之间行驶。必须克服 8% 的坡度,而且车间内还有其他 AGV 和手动操作车辆。为了确保四辆KAnIS叉车即使在托盘、网箱和金属框架与地面不完全一致的情况下也能用货叉拾取它们,叉车在货叉之间安装了一个移动摄像头。它可以测量承载架的袋口,从而使货叉在侧移时正确定位。车辆框架、电池门和配重也是定制的。
Hanke说:"我们的目标是尽可能将安全扫描仪、摄像头和传感器集成到车辆轮廓中,使其尺寸尽可能接近标准叉车。在大厅里,叉车使用激光扫描仪进行自我定位,在室外则使用差分 GPS(全球定位系统)(一种提高 GPS 精确度的方法),并在室内与室外区域的过渡处使用额外的本地传感器。与手动叉车不同的是,自动车辆总是在规定的路线上向后行驶,这样在紧急停车时,货物就不会从货叉上滑落。"

林德物料搬运和阿沙芬堡理工大学的研究项目“KAnIS – 协作式自主内部物流系统”的重点是自主叉车的协作行为:车辆通过 5G 网络和边缘服务器实时交换信息,并且可以相互沟通警告紧急情况。
与叉车和基础设施的实时通信
研究项目的一个重点是自动叉车对周围环境的感知,以确保其与其他道路使用者的可靠互动。为此,除了个人防护系统的传感器外,车辆还配备了额外的 3D 扫描仪和高清摄像头。摄像头数据是使用人工智能算法识别和分类物体的基础,然后对其进行定位,以便调整卡车的速度并将其减速至静止状态。但这还不是全部。另一个问题是,当道路使用者处于卡车传感器无法看到的隐蔽区域并接近卡车行驶路径时,就会出现危急情况。这时就需要叉车的合作,因为如果附近有另一辆叉车,它就可以提供相关信息。然而,前提条件是感知数据的实时传输。为了实现低延迟,在阿沙芬堡工厂建立了专用 5G 网络。感知数据从叉车传输到边缘服务器,该服务器从本地检测到的物体中创建所有识别物体的全局列表,并将其发送回叉车。
测试中,一个碰撞测试假人突然从墙后窜出,冲向车道。在没有合作行为的情况下,自动叉车无法及时停下,并撞向假人。如果叉车从附近的叉车接收到实时信息,就能提前识别危险情况,及时刹车。不过,由于不能总是假设附近有第二辆叉车,因此在 KAnIS 叉车未来行驶路线的路口和关口安装了 8 台固定式 3D 激光扫描仪。固定式激光扫描仪的本地对象列表也在边缘服务器上进行合并,并将信息提供给所有车辆。
"快速无线网络是自动驾驶叉车能够在室外区域协同行动并对不可预见的交通状况做出实时反应的先决条件。"TH AB 研究与转让副总裁 Klaus Zindler 教授博士在会上强调说。"我们的目标是利用人工智能方法开发通用标准和算法,然后将其灵活应用于不同的车辆或应用,并不断学习。"
传感器清洁系统,机器人为电池充电
在另一个工作包中,研究了如果靠近地面的光学传感器被雨中溅起的水或潮湿的路面弄脏,如何对其进行清洁。这是因为,如果无法再进行可靠的物体探测,人员保护系统就会自动将叉车调至安全状态并停止运行。为了防止这种情况发生,项目团队开发了一种清洁系统,利用压缩空气吹走聚集在激光扫描仪上的脏水滴。
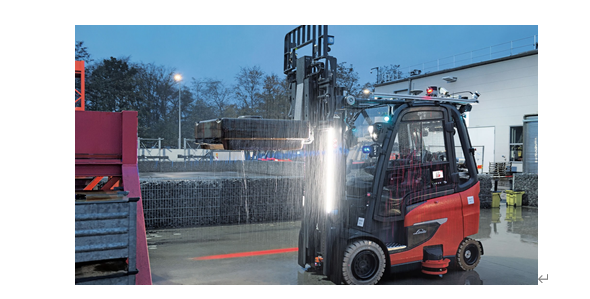
与纯粹的室内设备相比,室外区域对自动驾驶叉车的要求要高得多。除了坡度和倾斜度以及显著增加的人流量和车流量外,天气和温度条件也起着重要作用。
另一个项目小组研究了叉车电池自主充电的可能解决方案。结果发现,基于人工智能的机器人可以将充电插头连接到叉车的充电插座上。叉车的尾部也做了相应的改动,并增加了一个自动驱动的充电挡板,以保护充电插座免受灰尘和溅水的影响。

在 "KAnIS--合作式自主内部物流系统 "研究项目中,利用基于人工智能的机器人将充电插头连接到叉车的充电插座上,解决了叉车电池的自主充电问题。
相关资讯
更多- 华为云、Deepseek、Kimi、零次方等20家TOP模型企业齐聚,共创具身智能产业新范式
- 稳跑 2 年实测|牧星设备从容迎战 618 高强度订单峰值
- “上岗不摸鱼,搬运不打烊”—比亚迪平衡重式AGV实力尽显!
- 当公牛开始向细节要答案,一场无声的3C智造革命正在发生
- 破解无人车补能难题|爱普拉AGV无线充电机助力低速无人驾驶规模化落地
- 买叉车趁现在 | 618现已开启!硬核底价,全场直降
- 杭叉集团|深化“链主”牵引 共筑产业新生态——杭叉集团成功承办杭州市智能物流装备产业链对接活动
- OT10全球首秀|劢微机器人携智能物流机器人及数字孪生系统亮相LET 2026
- 海外展会 | 镭神智能诚邀您参加ILA Berlin 2026德国柏林航展
- 杭叉集团|杭叉集团与哈工鹏泽达成战略合作 拟共建智能清洁机器人合资公司