阿童木机器人首次解读AtomMotion
转载 2020-07-01 18:29 阿童木机器人 来源: 阿童木机器人

起源-梦想不会被终结
近年来,世界各国围绕核心技术的控制与反控制、争夺与反争夺,几乎每天都在演出一幕幕激烈、残酷的没有硝烟的战争。在工业4.0的大背景下,工业机器人被认为是智能制造的重要基石。但我国工业机器人企业面临着专利少、核心专利缺失的困境,与高歌猛进的下游应用市场形成巨大的反差。
由于长期以来在核心技术方面的滞后,我国工业机器人产业依然存在着不少的短板,控制器作为核心部件被国外垄断,我国在核心技术与美、日、德等国家差距明显。因此企业拥有自主核心技术才能获得快速稳定的发展。这是所有机器人领域从业者的一个梦想,也是一个长时间的追求。
阿童木机器人作为技术创新型企业,自成立以来持续投入自主控制系统的研发。我们需要做一款属于我们自己的控制器-AtomMotion。
PART 01-示教器篇
需要
大显示屏,
最大化的显示机器人操作的相关信息;
能够保证安全的按键操作。
它是我们理想的状态

(示教器)
一切尽在掌握中:10.1寸触摸屏设计,最大化显示机器人操作的相关信息。物理急停和使能按键设计,更大限度的保护操作工程师的安全。轻量化的选材,为操作工程师提供更体贴的关怀。符合实际应用场景的操作界面,最大限度的解放工程师的双手。
PART 02-控制器篇
需要
高性能处理器,
要具备实时性,网口保证可扩展性。
它是我们理想的状态

(控制器)
通用PC的纯代码实现:在X86架构下借助实时通讯技术,完成伺服电机的精准控制。支持多种并联机器人模型,不仅包含常用的并联3轴,并联3+1轴机器人模型,还包括并联4轴、串并混联5轴、Stewart等模型。
支持S型、多项式、sin曲线、cos曲线等速度规划类型,以满足工程师在不同场景下的不同需求。支持单跟踪、双跟踪、圆盘追踪等不同场合下的跟踪运动。支持在力矩模式下的拖动示教,以及复杂轨迹曲线的复现。
探索-沿着这条路跑下去
我国在机器人领域与世界处于跟跑、并跑和领跑“三跑”并行阶段,国外仍然有值得学习之处,但国内机器人企业也有自己的优势。在新一轮科技和产业变革的酝酿和推进中,也将为我们提供难得的"赶超发展"契机。
机器人模型篇
2020年Atom机器人家族中增加了两个新成员。作为Atom家族中的控制器,我们已经完成D4和S6两款机器人的数学模型支持。
(飓风-D4)
突破现有构型限制,实现2+2轴串并混联兼顾高速与高性能。具备沿XYZ轴平动以及绕Z轴旋转的功能特点。安装方式多样灵活,占地空间小,可简单部署于自动化生产线中。

(6自由度-S6)
经典的 STEWART 并联机构,轻松实现空间 6自由度运动,负载达到 3000kg,满足追求最高精度和最大负载需求。非常适于实验室、航空航天等行业的高精度测试作业,主要用于各种物料的装配和动作模拟等。
算法篇
1、 速度:我们再次优化了平滑段算法,在标准行程下。机械手的速度由220提升到了252次。

2、振动/精度:在完成了基本的速度规划后,AtomMotion优化了现有的速度规划,在相同的测试条件下进行测试,优化后的振动数值降低了将近百分之30。
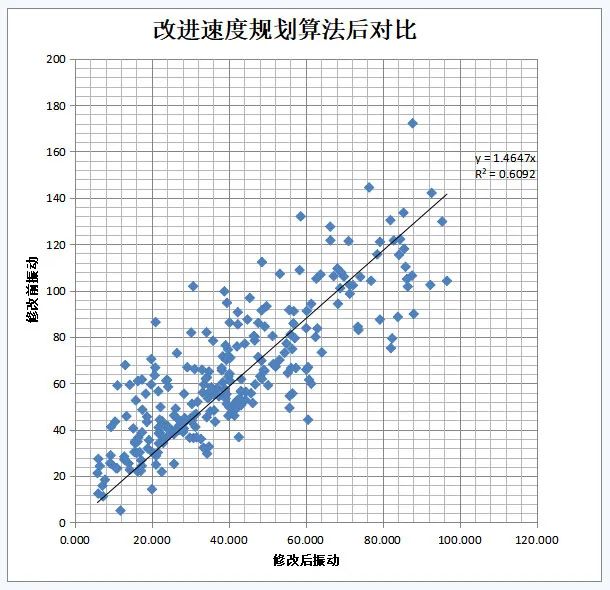
同时我们还分析了在不同变量(轨迹长度、平滑比例、运动规律类型、负载)下的振动表现,试图找出在不同环境下对运动的最优结果。
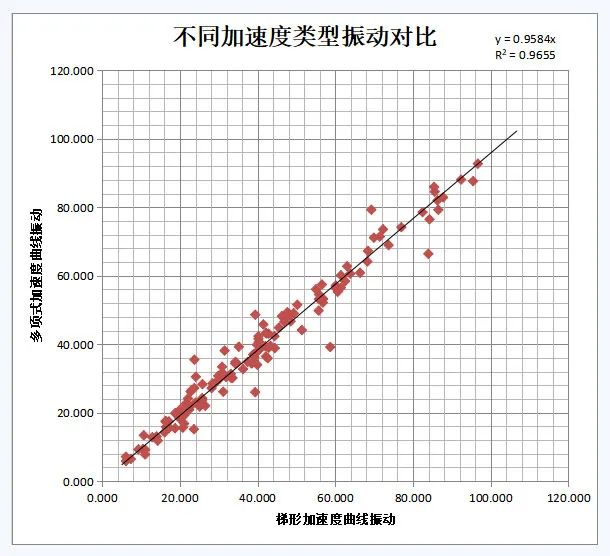
(不同加速度类型振动对比)
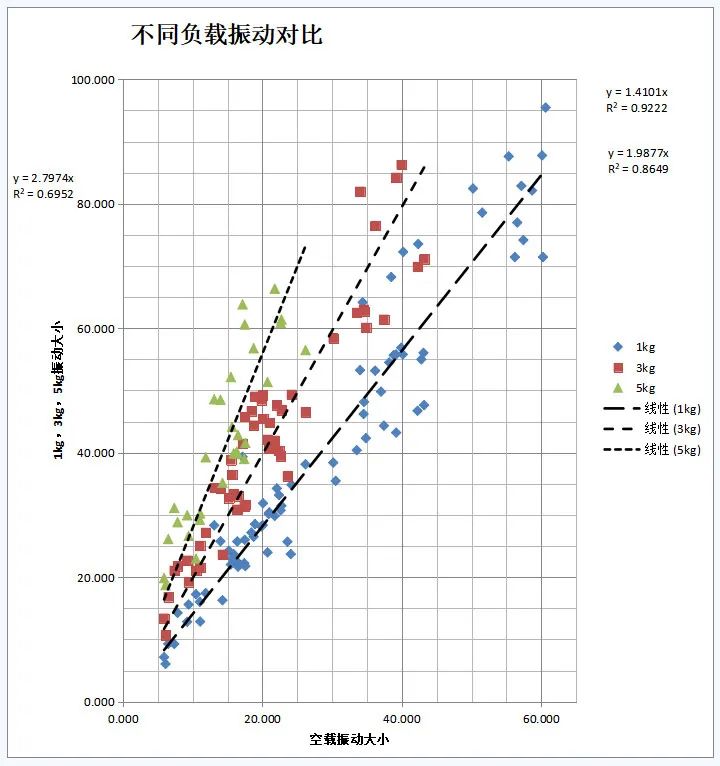
(不同负载)
(不同平滑)
(不同节拍)
(不同路径长度)
(不同追踪类型)
3、力矩控制:我们还改进了拖动示教算法,优化了拖动示教过程中的力补偿,使拖动过程变得更轻松。同时优化了拖动示教的轨迹跟踪算法,使并联机器人的拖动示教能够真正的进入到行业的生产现场中去。
奥德赛-吾等采石之人,当心怀大教堂之愿景
目前Atom控制器仍然有许多问题亟待解决。我们根据和国际控制器在相同条件下的振动测试对比表格,振动数值的结果还是非常可观的。但是我们在二次开发性上有所欠缺,导致在部分应用场景下应用不够灵活。同时在在不规则运动规律下的跟踪抓取精度不理想。
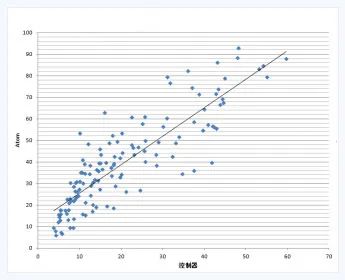
(振对对比)
接下来,我们仍将持续不断的提升Atom自主控制器的性能和功能,使AtomRobot能够适应更多不同的场景、更严格的技术要求。
我们将通过滤波技术的应用,减小机械手在运动过程中产生的振动,从而达到振动幅度降低。将持续优化跟踪运动轨迹,优化跟踪算法进一步缩小跟踪误差,最终提升跟踪精度。建立二次开发平台环境,能够适应更多的应用场景。同时进一步优化用户界面操作,降低用户界面操作的学习成本。
相关资讯
更多- 永恒力启动新一代EFG系列锂电平衡重叉车销售
- 美国车载式叉车生产商Donkey Forklifts迎来创立40周年
- 冷库托盘位从2000个增至逾1.5万个:KNAPP以SAP EWM打通Derstine’s两座温控仓
- 优必选携手哈萨克斯坦:共建中亚具身智能新生态,打造“一带一路”科技走廊
- WAIC 2026 | 智元最强“打工天团”集结,未来工作现场见!
- 仙工智能具身智能家族集结亮相|2026 亚太国际具身智能产业链展览会,青岛开展!
- 镭神智能机械式多线防爆(本安和隔爆)激光雷达:煤矿石油化工高危场景适配方案
- 生态大会|睿享同行共筑产业生态,视觉领航深圳智造未来
- 二十载深耕破局出海 环信配件打造中国工业车辆配套出海新标杆
- 直击青岛物流装备展|中国超窄通道叉车销量榜首合肥搬易通(MiMA 米玛)现场交付!