你是我的眼~带我领略四季的变换~~
转载 2020-08-28 17:42 科钛机器人 来源:科钛机器人
“你是我的眼~带我领略四季的变换~你是我的眼~带我穿越拥挤的人潮~你是我的眼~带我阅读浩瀚的书海~因为你是我的眼~让我看见这世界就在我眼前~就在我眼前~”
随着信息技术以及计算机科学的发展,人工智能逐渐成为各个领域的研究热点,作为人工智能典型代表的AGV移动机器人进入了新的研究热潮,机器人避障是AGV技术领域中活跃的研究分支。在AGV移动过程中,障碍物检测是机器人安全避障的前提条件和基本功能,视觉引导具有不可代替的优越性,因此移动机器人视觉障碍物检测具有重要的研究价值与实践意义。
目前利用超声波、红外线、激光雷达、彩色摄像头、多传感器融合进行障碍物检测时,会存在较多的问题,如不能获取障碍物目标的边界信息、计算量大以及融合算法复杂,对传感器同步要求较高影响工作效率,增加运行所需的能耗等。针对上述的问题,提出基于双目深度摄像头作为传感器来进行障碍物检测以及避障的方案。
双目深度相机具有体型小、功耗低、分辨率较高及实时性较高等优点。它就像是AGV的“眼睛”,凭借这双眼镜AGV能够获取周围的世界的深度信息,可以让AGV获取周围世界的三维信息。AGV“眼睛”的加入解决了二维激光只能扫描一个平面来进行避障的局限性,在避障方面有更多的用途和更大的优势。

工作原理
解决机器人如何“看”的问题,也就是大家常听到的计算机视觉。其基础在于如何能够从二维的图像中获取三维信息,从而了解我们身处的这个三维世界。
视觉识别系统通常来说可以包括一个或两个摄像头。单一的照片只具有二维信息,犹如2D电影,并无直接的空间感,只有靠我们自己依靠“物体遮挡、近大远小”等生活经验脑补。故单一的摄像头获取到的信息及其有限,并不能直接得到我们想要的效果。类比到机器视觉中,单个摄像头的图片信息无法获取到场景中每个物体与镜头的距离关系,即缺少第三个维度。
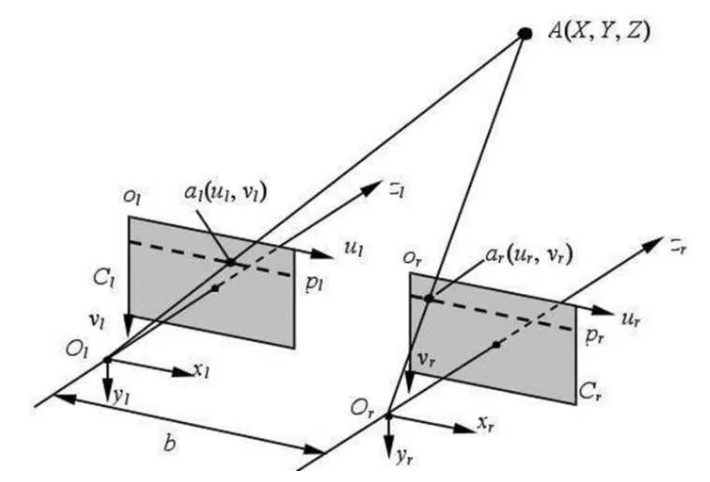
双目立体视觉犹如3D电影,能够直接给人带来强烈的空间临场感。类比机器视觉,从单个摄像头升级到两个摄像头,即立体视觉能够直接提供第三个维度的信息,即景深,能够更为简单的获取到三维信息。双目视觉最常见的例子就是我们的双眼:我们之所以能够准确的拿起面前的杯子、判断汽车的远近,都是因为双眼的双目立体视觉,而3D电影、VR眼镜的发明,也都是双目视觉的应用。
双目视觉的基本原理是利用两个平行的摄像头进行拍摄,然后根据两幅图像之间的差异,利用一系列复杂的算法计算出特定点的距离,当数据足够时还能生成深度图。
利用双目深度相机采集到深度信息获得深度图像,对获取的深度图像进行预处理去除噪声干扰与去除无关区域信息,再对处理好的深度图像进行障碍物的检测提取,可以检测出人体、其他AGV、货架等各种障碍物,最后输出障碍物的坐标以及障碍物离AGV的距离信息。根据最终输出的信息判断避障等级实现AGV实时避障。


相机规格参数


展望
避障功能作为近年来AGV的大趋势,带来的最直接的好处就是,以往一些人为疏忽造成的撞击,现在都能经由避障功能去避免,既保障了AGV自身安全的同时,也避免了对周围人员财产的损害,让AGV的门槛进一步得到了降低。
而长远来看,AGV想要普及到更广阔的应用领域,智能化肯定是必经之路,只有更加智能化,才能去满足不同行业的需求。如今由避障功能而衍生出的一系列智能路径规划功能,无疑就是AGV智能化的阶段性体现之一。
相关资讯
更多- 华为云、Deepseek、Kimi、零次方等20家TOP模型企业齐聚,共创具身智能产业新范式
- 稳跑 2 年实测|牧星设备从容迎战 618 高强度订单峰值
- “上岗不摸鱼,搬运不打烊”—比亚迪平衡重式AGV实力尽显!
- 当公牛开始向细节要答案,一场无声的3C智造革命正在发生
- 破解无人车补能难题|爱普拉AGV无线充电机助力低速无人驾驶规模化落地
- 买叉车趁现在 | 618现已开启!硬核底价,全场直降
- 杭叉集团|深化“链主”牵引 共筑产业新生态——杭叉集团成功承办杭州市智能物流装备产业链对接活动
- OT10全球首秀|劢微机器人携智能物流机器人及数字孪生系统亮相LET 2026
- 海外展会 | 镭神智能诚邀您参加ILA Berlin 2026德国柏林航展
- 杭叉集团|杭叉集团与哈工鹏泽达成战略合作 拟共建智能清洁机器人合资公司