索尼推出新技术推动自主移动机器人发展,五篇论文被IROS2024录用
转载 2024-10-23 09:35 索尼 来源:索尼
索尼集团公司(简称:索尼集团)近日宣布,索尼集团和索尼互动娱乐公司(简称:SIE)发表的五篇关于机器人移动性的研究论文已被IEEE(电气与电子工程师协会)和RSJ(日本机器人学会)联合主办的智能机器人与系统国际会议(IROS)2024录用。该会议是AI(人工智能)和机器人领域的顶级国际会议。这些论文的研究重点在于开发能够在多种环境中移动和行动的自主机器人。
秉持“用创意和科技的力量感动世界”为宗旨,索尼致力于研发多种技术,以实现人们创造力的充分发挥。机器人技术是索尼可以将其核心技术——AI、传感技术和数字虚拟世界技术结合起来的实际应用领域。索尼将继续在基础技术方面进行研发,协调各技术领域,提供新的KANDO(感动)体验,为建设更可持续的社会做出贡献。
关于内藏型全方位球型轮的研发
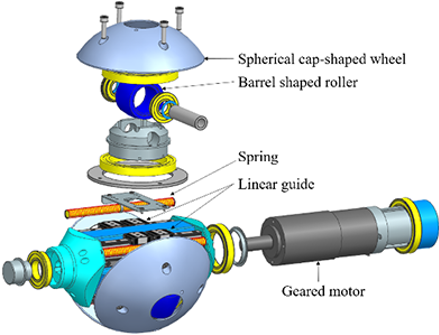
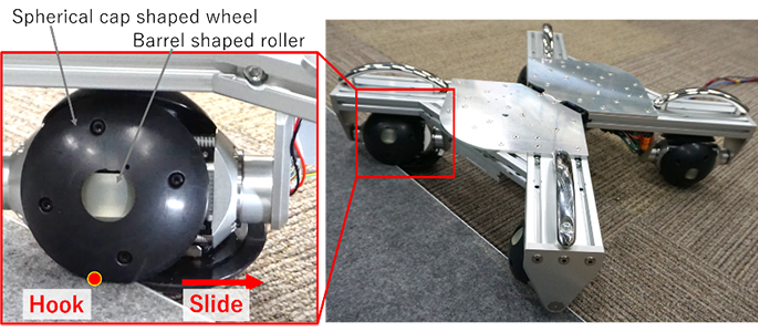
索尼集团对一种六轮机器人进行了研究,该机器人可以在平坦表面上使用轮式移动和在不平坦地形上使用腿式移动之间切换,实现高效运动。为了增强轮式移动的能力,设计一种能够稳定跨越台阶和障碍物的车轮装置至关重要。为此,索尼集团开发了内藏型全方位球型轮(PTOB),这是一种嵌入电机的全向轮,能够在遇到台阶时自动改变形状。这项技术不仅有潜力推动轮腿机器人的发展,还可以应用于轮椅和推车等轮式车辆。本文被提名为IROS 2024机器人机构设计最佳论文奖的决赛入围作品。
作者:Kazuo Hongo (索尼集团公司), Takashi Kito, Yasuhisa Kamikawa, Masaya Kinoshita, and Yasunori Kawanami
参考文献:[2403.12160]开发一种用于增强爬坡和减振的紧凑坚固的内藏型全方位球形轮
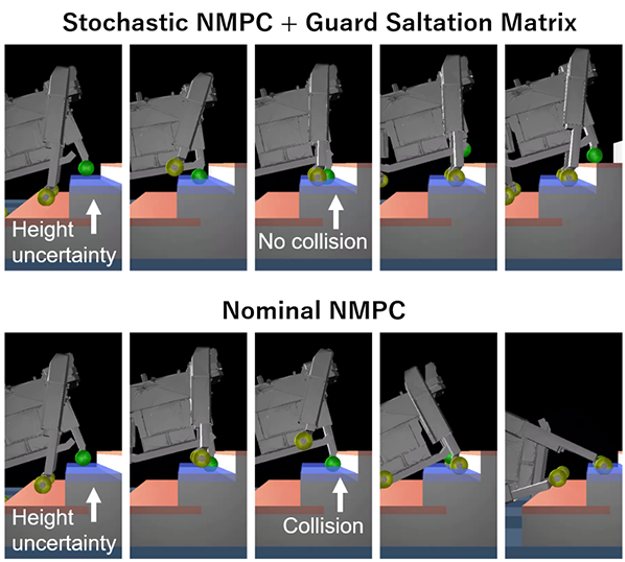
通过零阶随机非线性模型预测控制
与防护跳跃矩阵增强基于模型的鲁棒性
腿式机器人需在周围环境感知存在不确定性时采取安全行动。传统的基于模型的方法难以将这些不确定性有效地纳入运动生成中。因此,工程师们必须花费大量精力调整各种控制参数以保证安全。在本研究中,索尼集团开发了一种方案,通过使用防护跳跃矩阵,考虑环境的不确定因素来预测未来运动的不确定性。将该方案与基于优化的运动生成相结合,机器人即使在对周围环境的测量不完善的情况下,也能生成安全的全身运动(例如,腿部动作和接触位置)。
作者:Sotaro Katayama(索尼集团公司), Noriaki Takasugi, Mitsuhisa Kaneko, Norio Nagatsuka, Masaya Kinoshita
参考文献:[2403.14159]通过零阶随机非线性模型预测控制与防护跳跃矩阵增强基于模型的鲁棒性
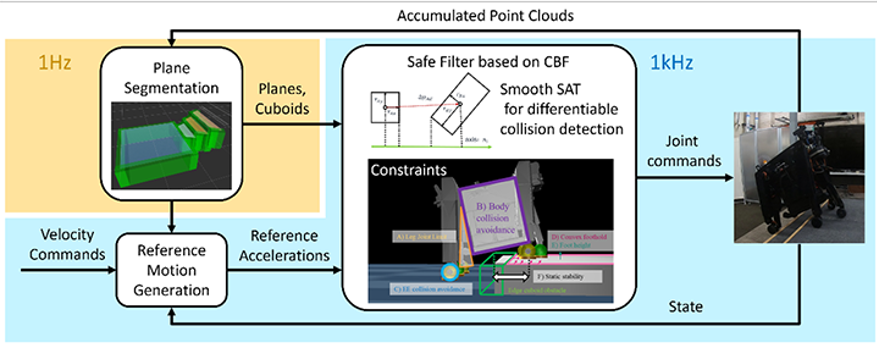
基于分析平滑处理的控制障碍函数的
六轮伸缩腿型机器人Tachyon 3的
实时感知运动控制
为了适应不同环境的移动,机器人必须实时利用环境感知生成最佳运动路线。但在足够快速的计算时间内计算出避开周围障碍物的最佳运动路线始终是一个挑战。为此,索尼集团开发了一种新的碰撞检测技术,称为平滑分离轴定理。将此技术与一种安全关键控制方法——控制障碍函数相结合,机器人可以在1毫秒的计算时间内生成安全平滑的运动,将其腿部放置在安全区域。
作者:Noriaki Takasugi(索尼集团公司), Masaya Kinoshita, Yasuhisa Kamikawa, Ryoichi Tsuzaki, Atsushi Sakamoto, Toshimitsu Kai, and Yasunori Kawanami
参考文献:[2310.11792] 基于解析平滑控制障碍函数的六轮伸缩腿型机器人Tachyon 3的实时感知运动控制
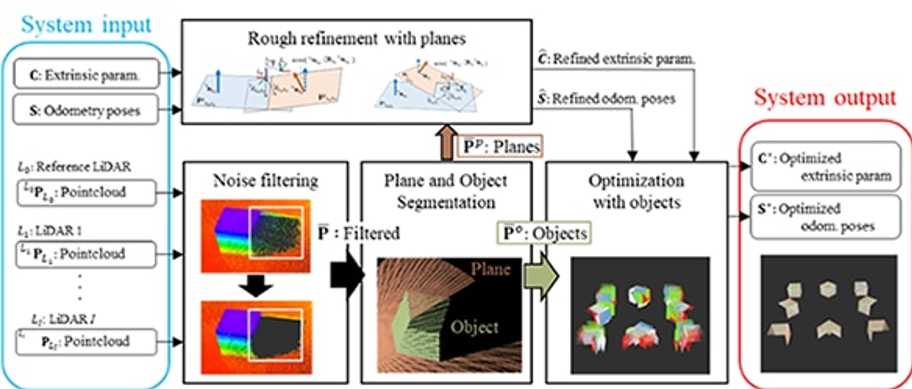
基于楼层平面图和物体分割的
移动机器人多激光雷达外部校准
随着机器人应用的日益广泛,更加需要日常硬件的维护(如部件和传感器的更换)。特别是在传感器重新安装后,需要确保传感器精确调整到原始位置,通常使用专业组件如校准基板。为了解决这个难题而不使用特制元件,索尼集团开发了一种校准方法,通过感知周围地面和物体的点云,同时调整多个传感器的位置。此外,该方法即使在传感器之间没有重叠视野的情况下也能实现高精度校准,从而使机器人设计中的传感器的布置具有更大的灵活性。
作者:Shun, Niijima(索尼集团公司), Atsushi Suzuki, Ryoichi Tsuzaki, Masaya Kinoshita
参考文献:[2403.14161] 基于楼层平面图和物体分割的移动机器人多激光雷达外部校准

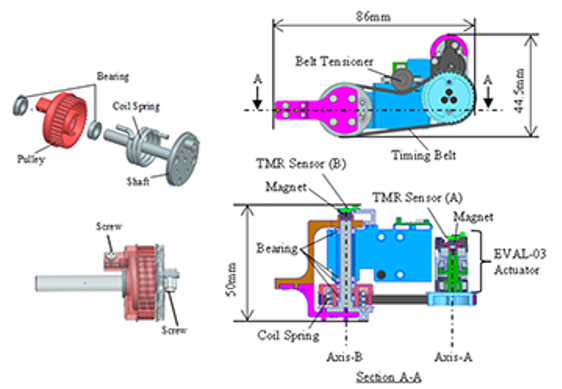
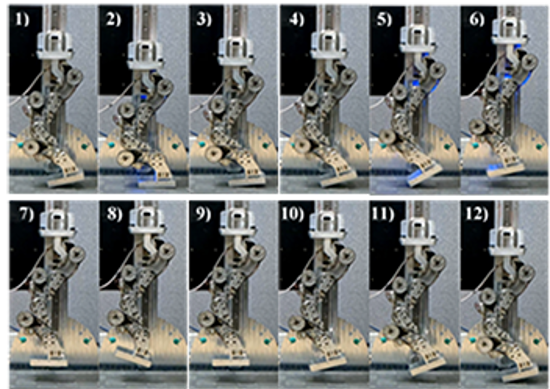
双向弹性串联驱动器与扭力螺旋弹簧的开发
及其在腿足式机器人中的应用
索尼互动娱乐公司(SIE)通过机器人探索新的可能。为了使机器人能够执行如跑步和跳跃等动态动作,需要提供减震能力并增加执行器的输出功率。本研究中,SIE新开发了一种使用扭力螺旋弹簧的小型弹性串联驱动器,并将其应用于单足机器人。这一机制利用弹簧储存的弹性,实现高效的连续跳跃运动。
作者:Yuta Koda (索尼互动娱乐公司), Hiroshi Osawa, Norio Nagatsuka, Shinichi Kariya, Taeko Inagawa, Kensaku Ishizuka
参考文献:[2409.15791] 双向弹性串联驱动器与扭力螺旋弹簧的开发及其在腿足式机器人中的应用
关于IROS 2024
IROS是全球最大的机器人技术国际会议,由IEEE(电气与电子工程师协会)和RSJ(日本机器人学会)联合主办。
日期:2024年10月14日(周一)——2024年10月18日(周五)
会议地点:阿联酋阿布扎比国家展览中心(ADNEC)
参会需预先注册登记。点击阅读原文,直达IROS 2024官网以获取更多信息。